מרכז הידע
ברוכים הבאים למרכז הידע של TeamCAD! כאן תוכלו למצוא מגוון סיפורי לקוחות, טיפים ומדריכים של מיטב המומחים שישדרגו את השימוש שלכם במוצרי Autodesk !
ברוכים הבאים למרכז הידע של TeamCAD! כאן תוכלו למצוא מגוון סיפורי לקוחות, טיפים ומדריכים של מיטב המומחים שישדרגו את השימוש שלכם במוצרי Autodesk !
מיטב המומחים שלנו יצרו עבורכם מאגר של עשרות טיפים במגוון נושאים, על כל תוכנות Autodesk
כל הטיפים הכי שימושיים לאפליקציית חישוב שטחים ברוויט Revit– AUTO AREA ROBOT, היכנסו וגלו


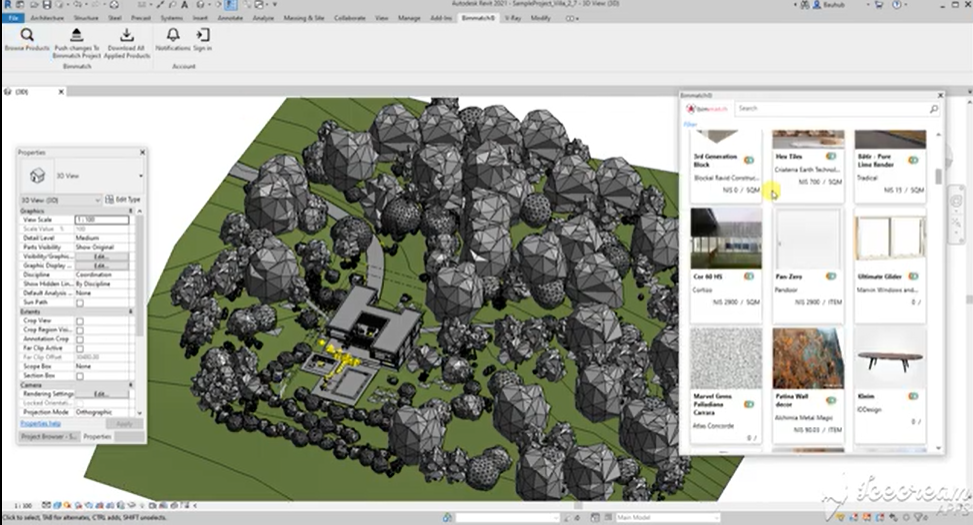
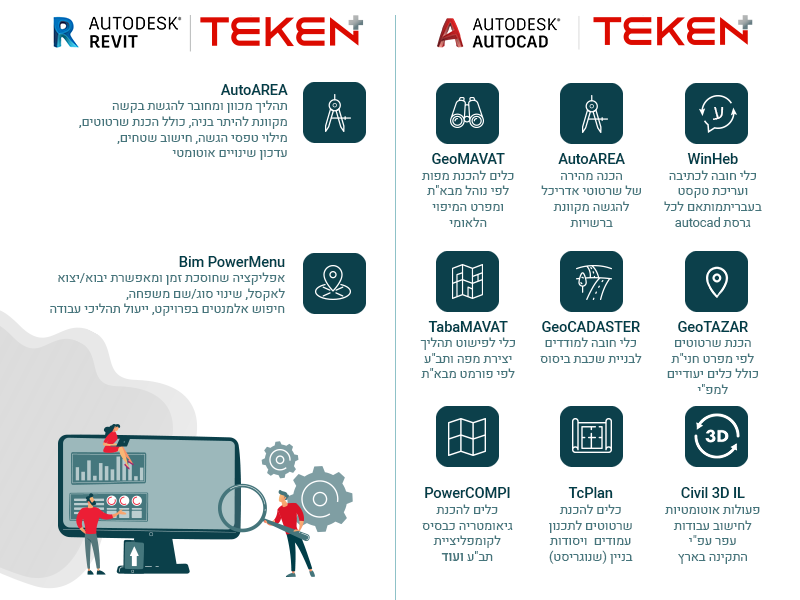
הטיפ שלפניכם שם זרקור על פיצ'ר אחד מכל אפליקציה בתוך חבילת TekenPlus, היכנסו וגלו!
"רוויט בתוך האוטוקאד"- היכנסו וגלו את הפיצ'רים באפליקציית Power Menu
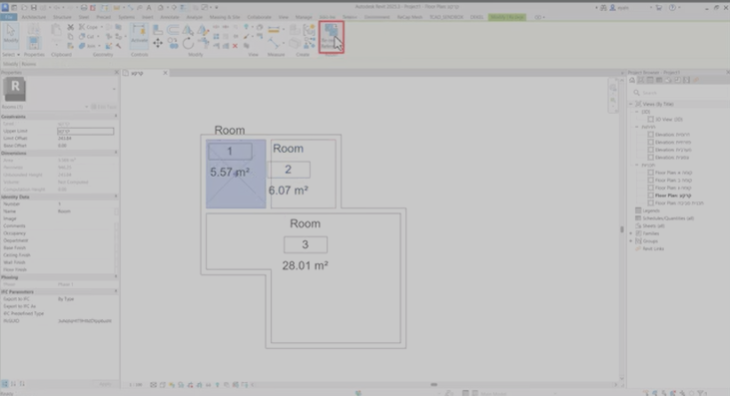
בואו להכיר את האפליקציה Auto Area Robot לחישוב שטחים יעיל ומהר יותר ב-Revit

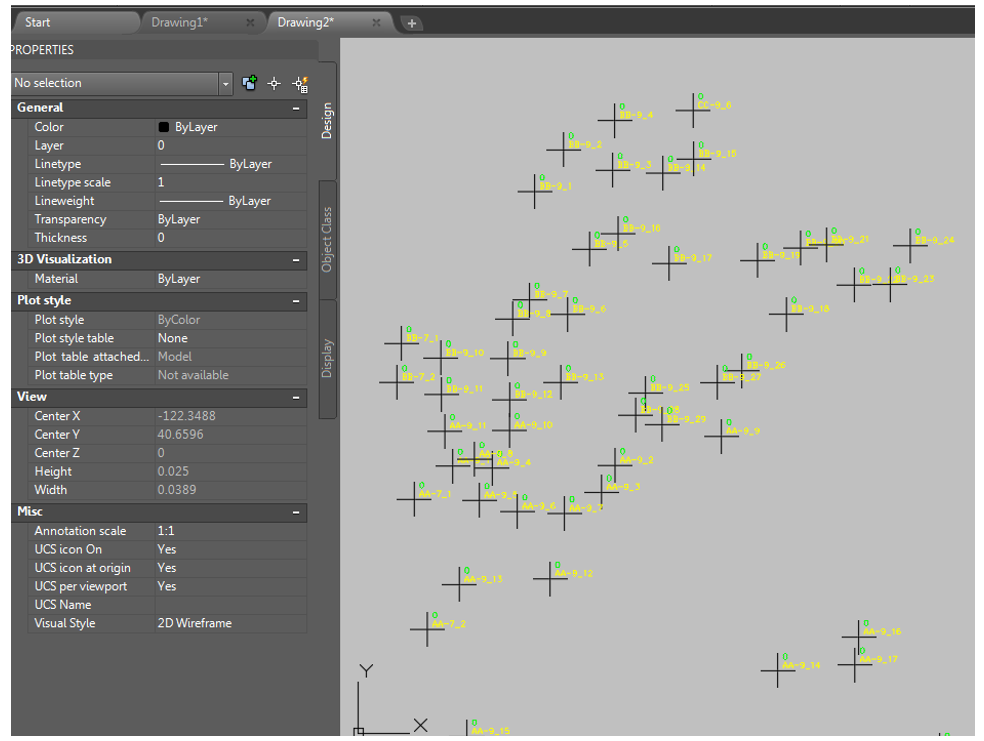
הכירו כיצד בשימוש באפליקציית GEOMavat ניתן לקלוט קבצי נקודות

TEKEN+ Online Video Help 24/7 בא להזכיר לכם ...

צפו בסרטון קצר המפרט את השינויים החשובים שנוספו לאפליקציה

האם את\ה אדריכל\ית ורוצה לשלוח שרטוט לרובוט להגשה מקוונת כבר הפעם הראשונה בלי טעויות?
הכירו את אפליקציית WinHEB מבית TeamCAD

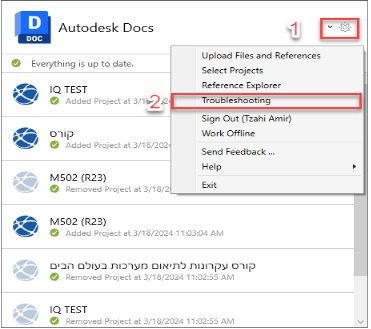
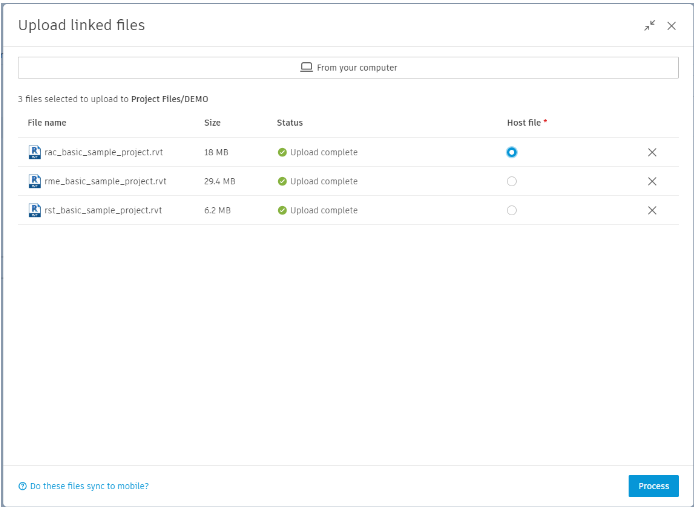
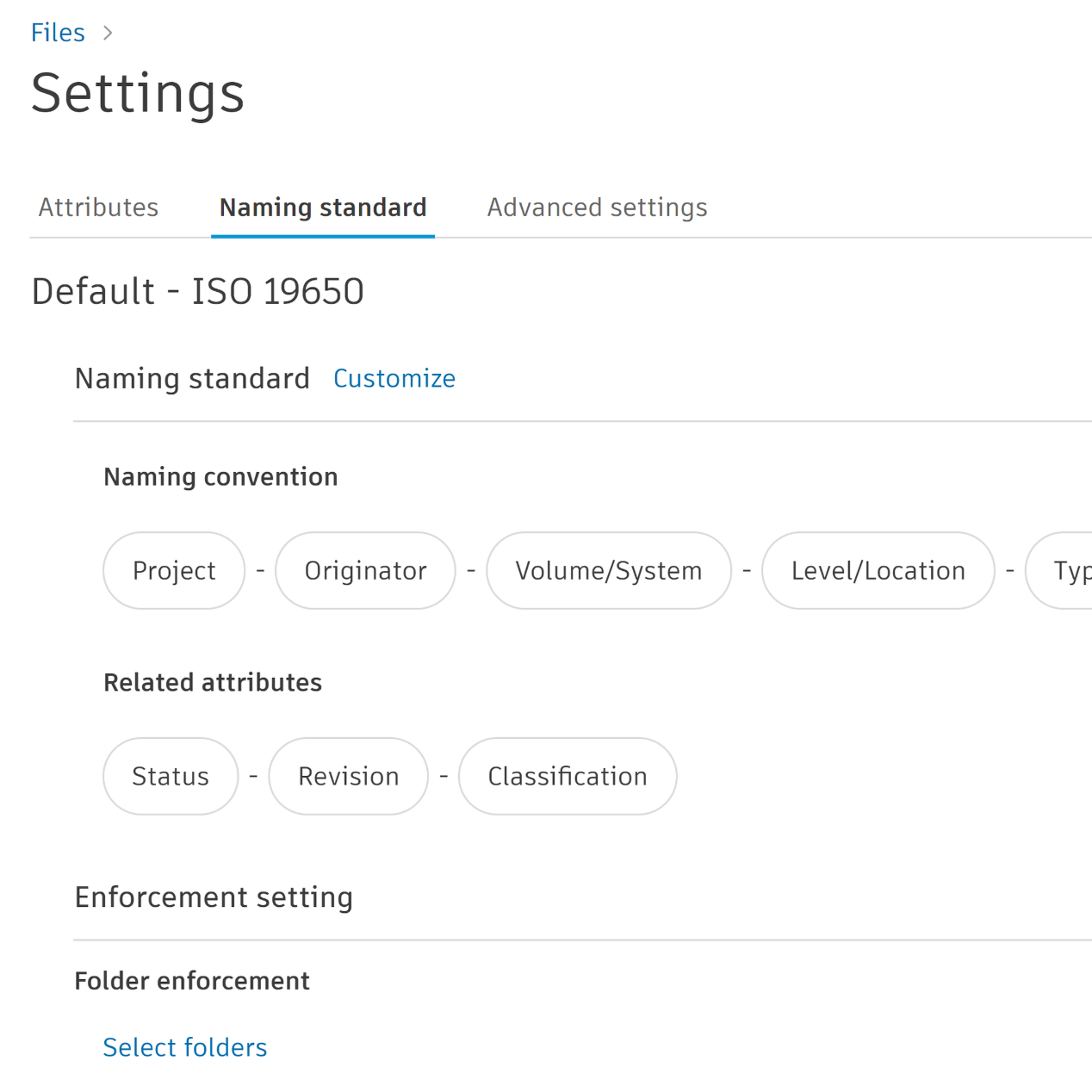
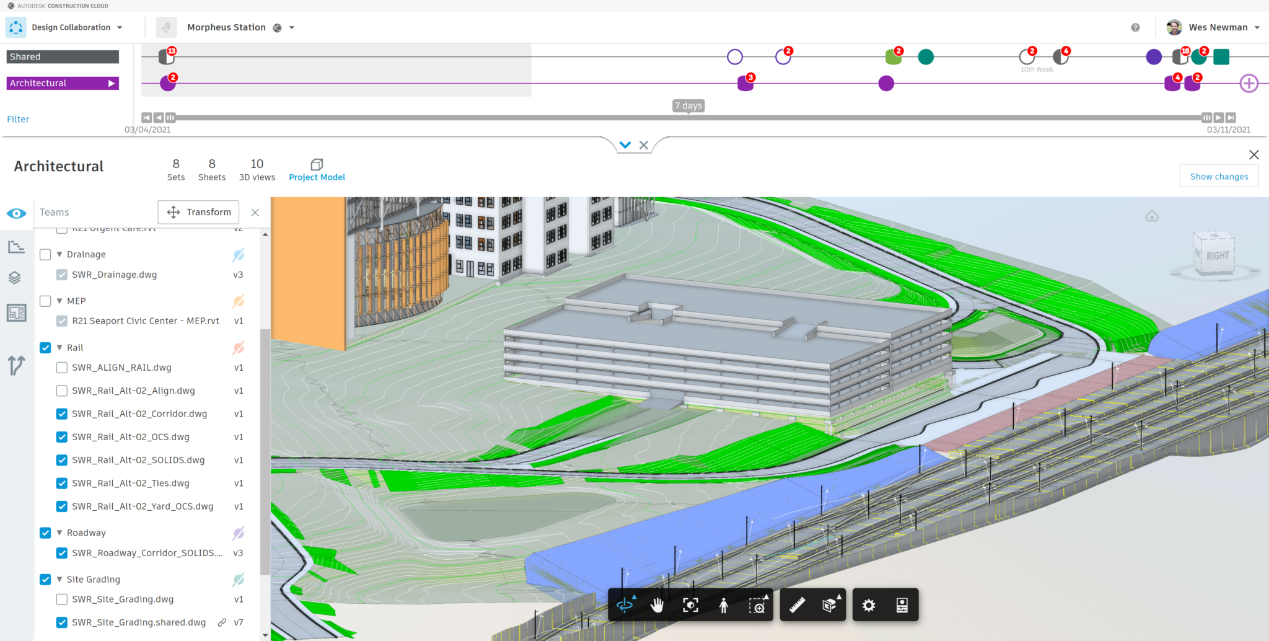
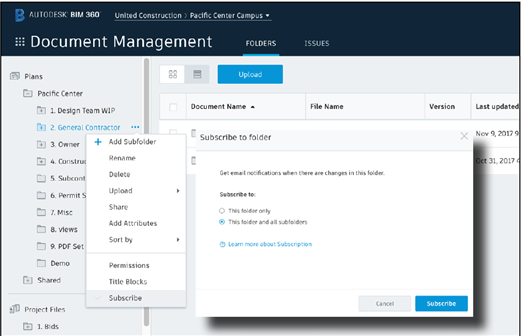
המומחה יניב סטולר עם הנחיות מלאות שיסייעו לכם להבטיח שמודל ה-Revit ותכניות ה-2D יופיעו כראוי בענן ACC,
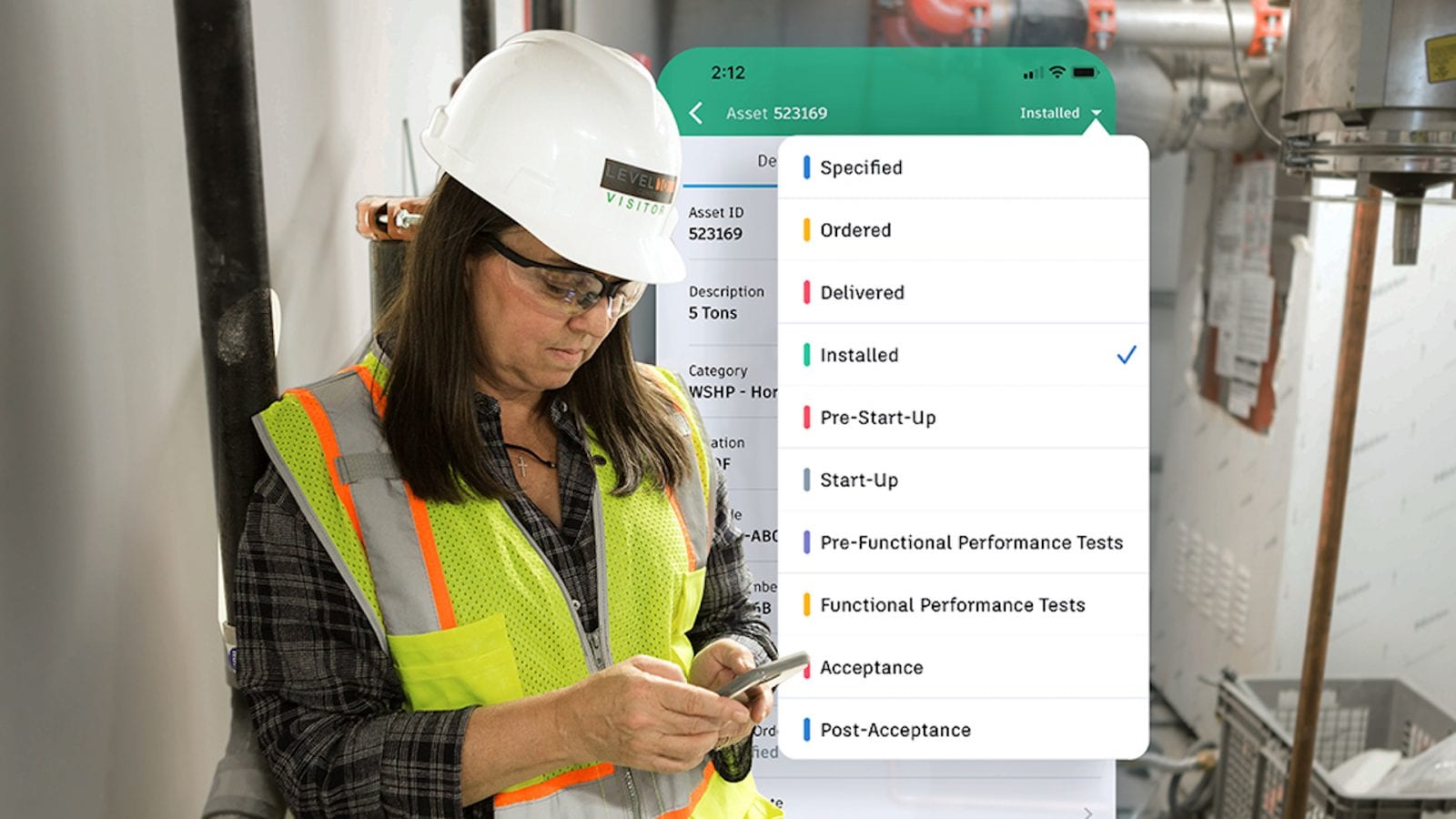
המומחה יניב סטולר על Extended Properties ב-ACC המאפשר לעדכן סטטוס, לסמן, ולייצא ישירות בענן, מבלי להיות מומחי BIM

רוצים להוביל שינוי דיגיטלי בענף הבניה? דבי רוח משיח על קורס BIM Management המספק כלים פרקטיים לתאום יעיל יותר ויתרון תחרותי
דבי רוח משיח על קורס BIM Manager - בואו לקחת את הקריירה שלכם לשלב הבא ולהוביל את תחום ה-BIM במשרדי תכנון

דבי רוח משיח על קורס Dynamo - בואו ללמוד כיצד להפוך את Revit לכלי עוצמתי ואוטומטי
דבי רוח משיח על קורס Revit Structure- בואו להכיר את הדרך הנכונה להפוך למומחי מידול שלד מבנה בשיטת BIM

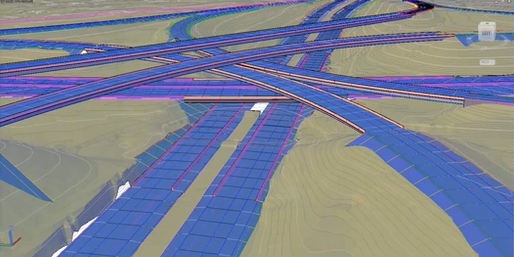
דבי רוח משיח עם פרטים מלאים על הקורס החדש למידול תשתיות תת-קרקע בשיטת BIM, אל תחמיצו, בואו להתעדכן
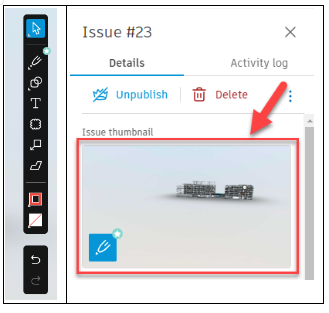
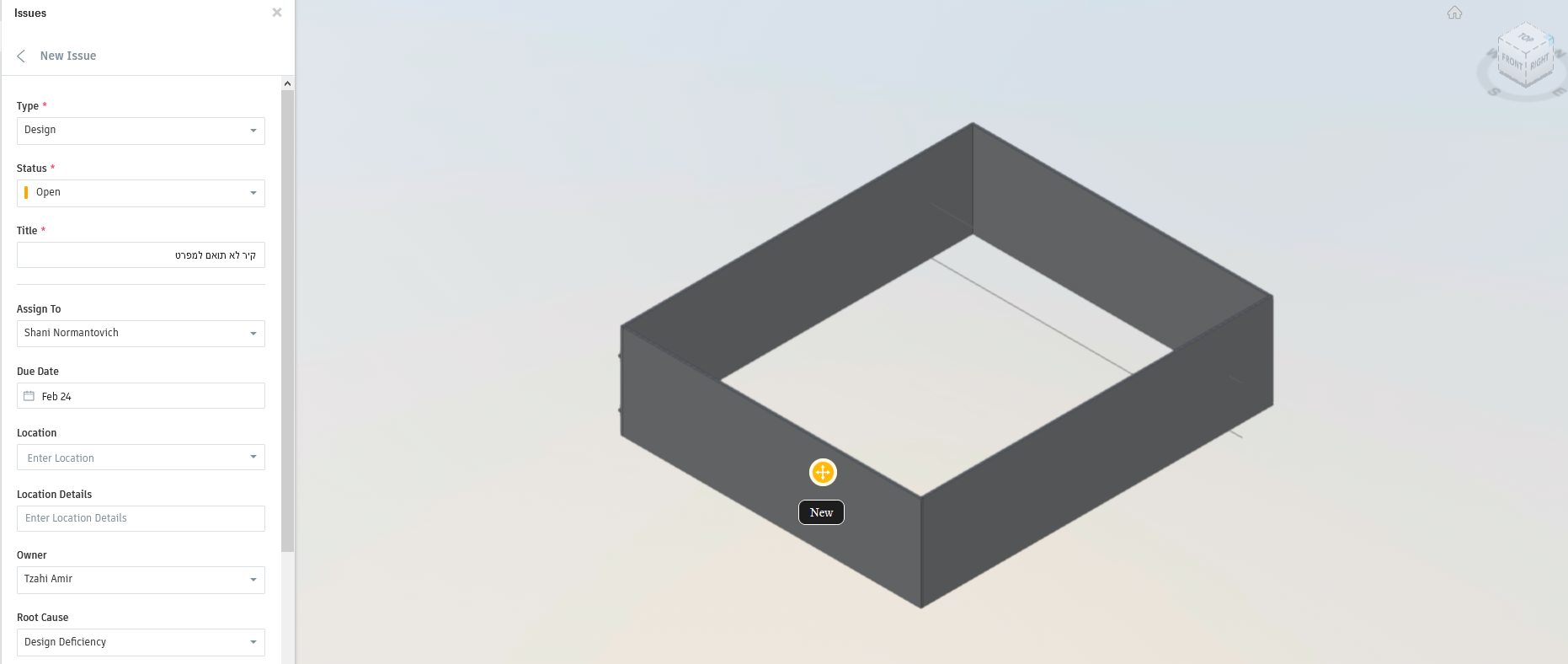
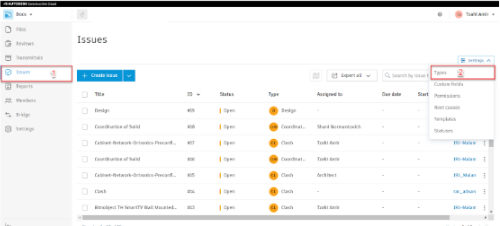
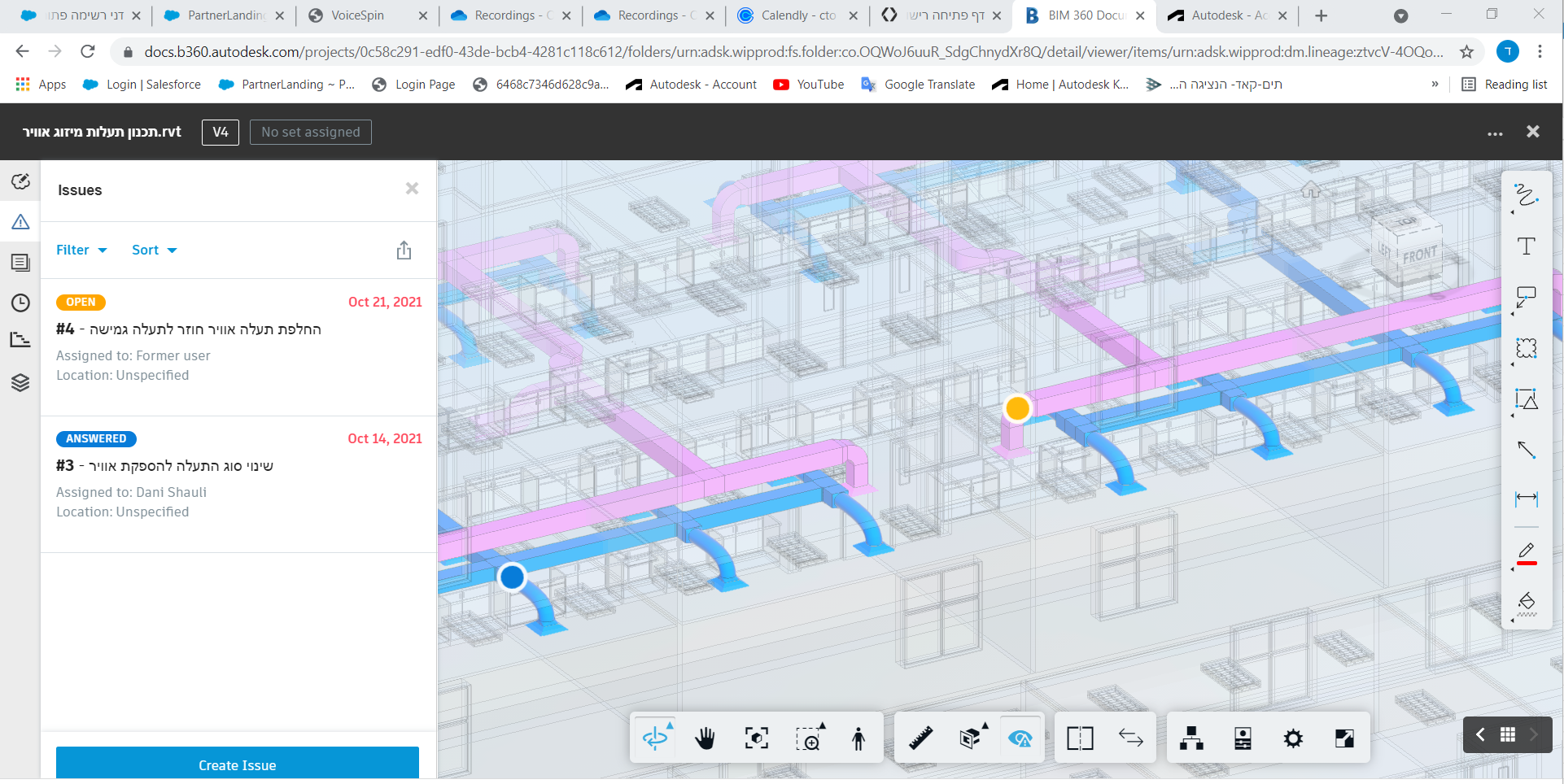
המומחה יניב סטולר מציג כיצד להפוך את ה-Issues לכלי עצמתי לניהול משימות יעיל באתר, ממעקב דרך ליקויים ועד לדוחות ודשבורדים

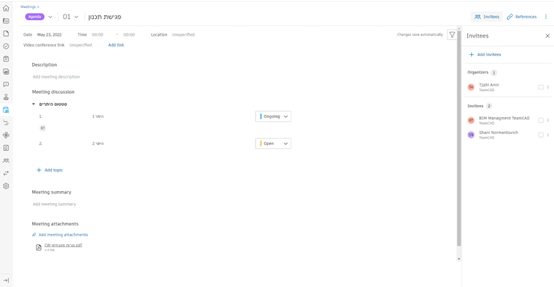
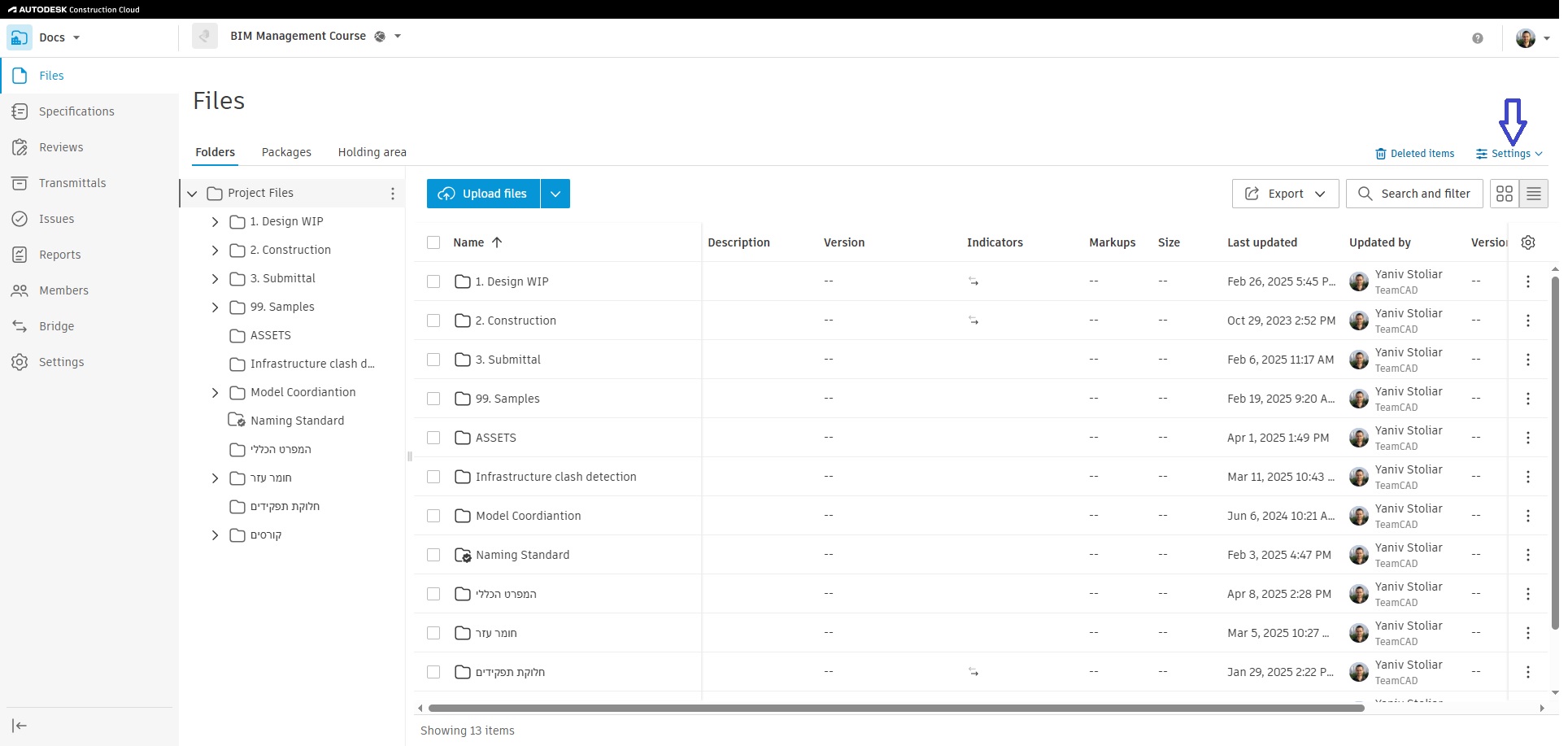
המומחה יניב סטולר מציג כיצד ה-ACC מרכזת את כל כלי ניהול הפרויקטים, ממסמכים ועד דוחות הכל במערכת ענן אחת פשוטה ויעילה
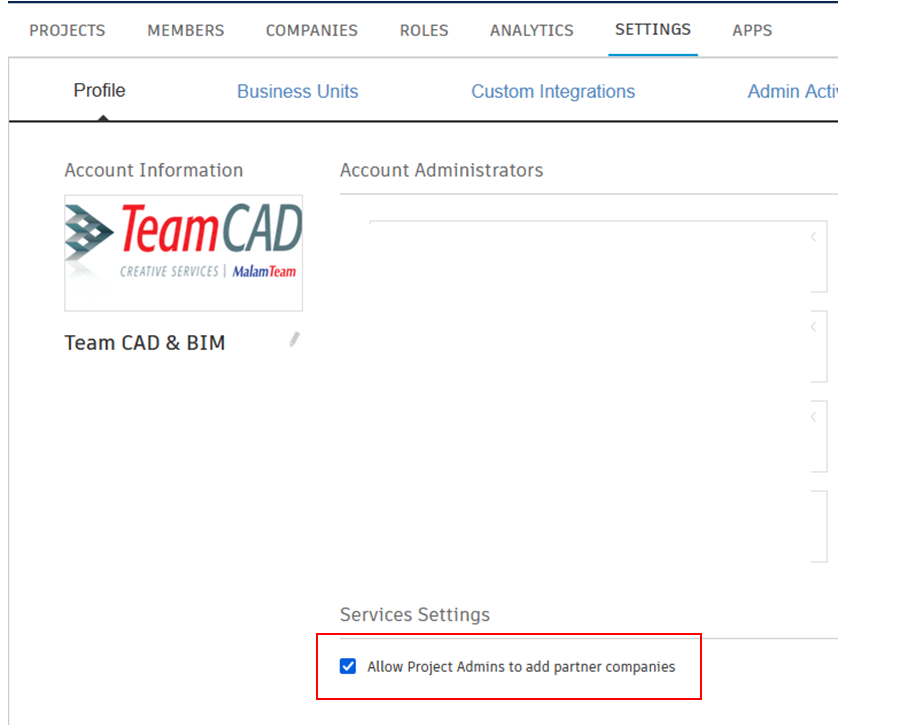
המומחה יניב סטולר על החידושים האחרונים ב-ACC שיאפשרו לכם שיתוף בין שרתים, דוחות, הרשאות לפי תפקיד ועוד, בואו להתעדכן
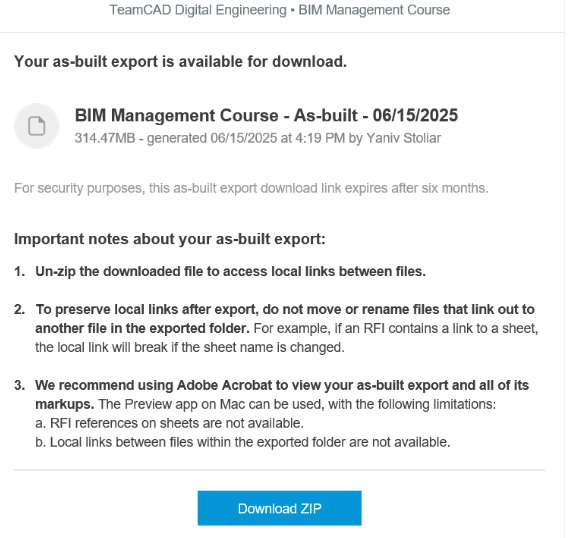
המומחה יניב סטולר על ייצוא חכם יותר ב-ACC שיאפשר לכם להעביר את המידע באופן חכם, נגיש ומסודר ללקוח או לארכיון
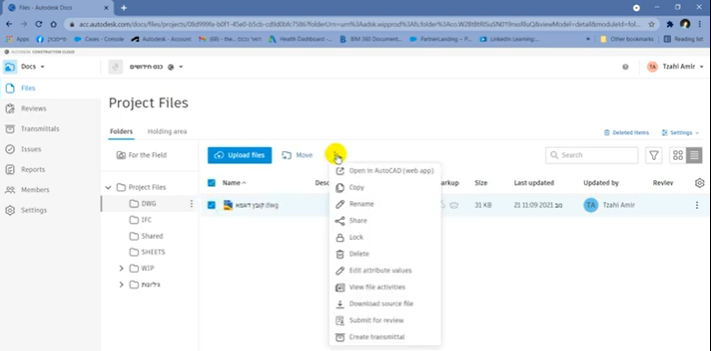
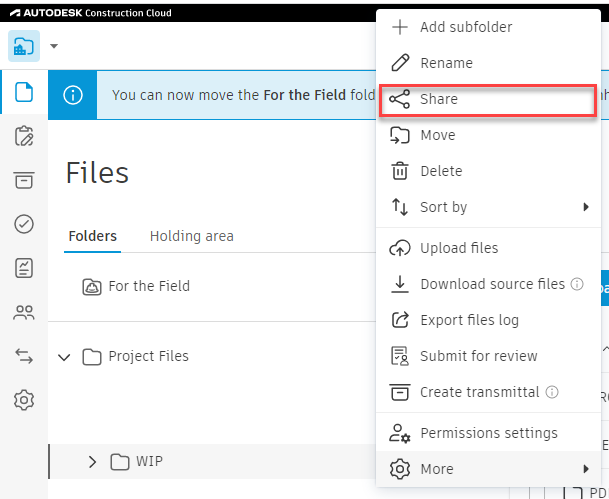
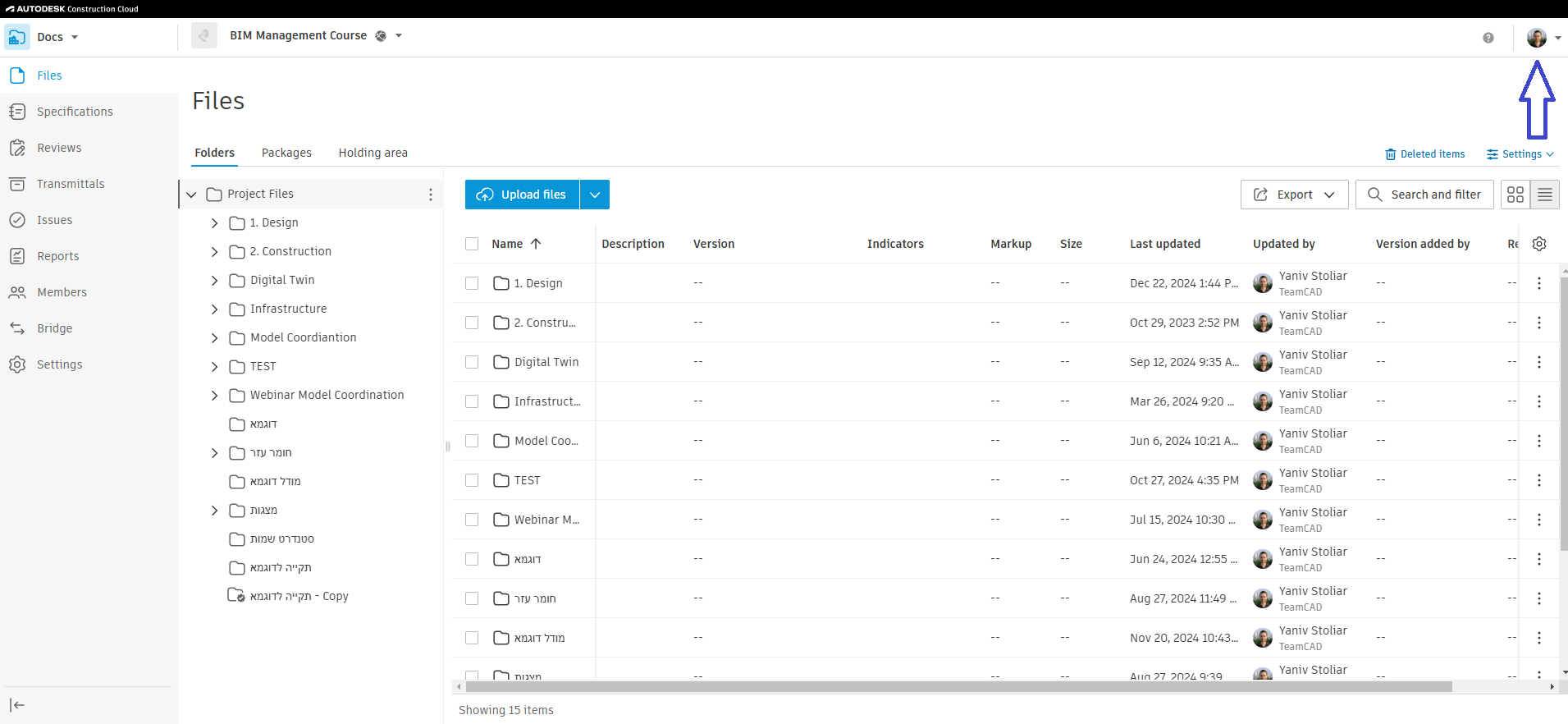
המומחה יניב סטולר על שיתוף קבצים חכם ב-ACC שיאפשר לכם מעקב בזמן אמת, תיעוד וייצור דאטה לניתוחי עומק והתייעלות בפרויקט
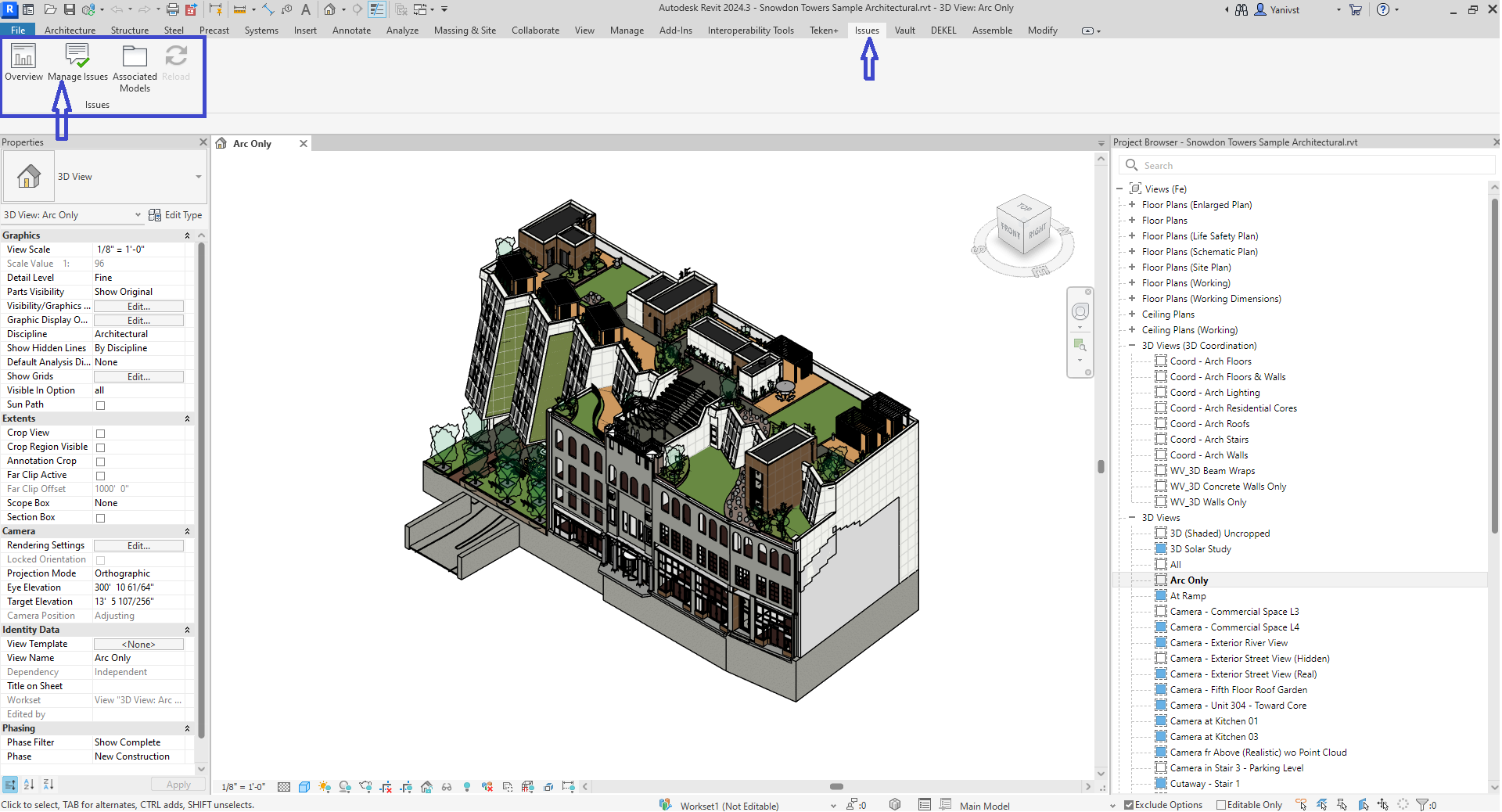
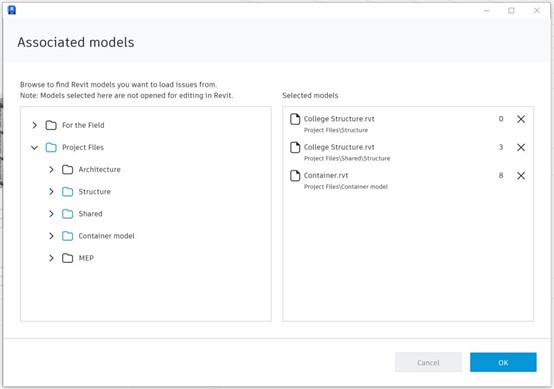
המומחה יניב סטולר על יכולת הסנכרון החדשה ליצירת הערות- Issues, בענן ACC ישירות ב-Revit, בואו ללמוד
המומחה יניב סטולר על ניהול התראות בהתאמה אישית ישירות למייל שלכם ב-Autodesk Construction Cloud
גלו כיצד ליצור תכנית איכות לפרוייקט, לבנות טםסי בקרת איכות ולקשר אותם.
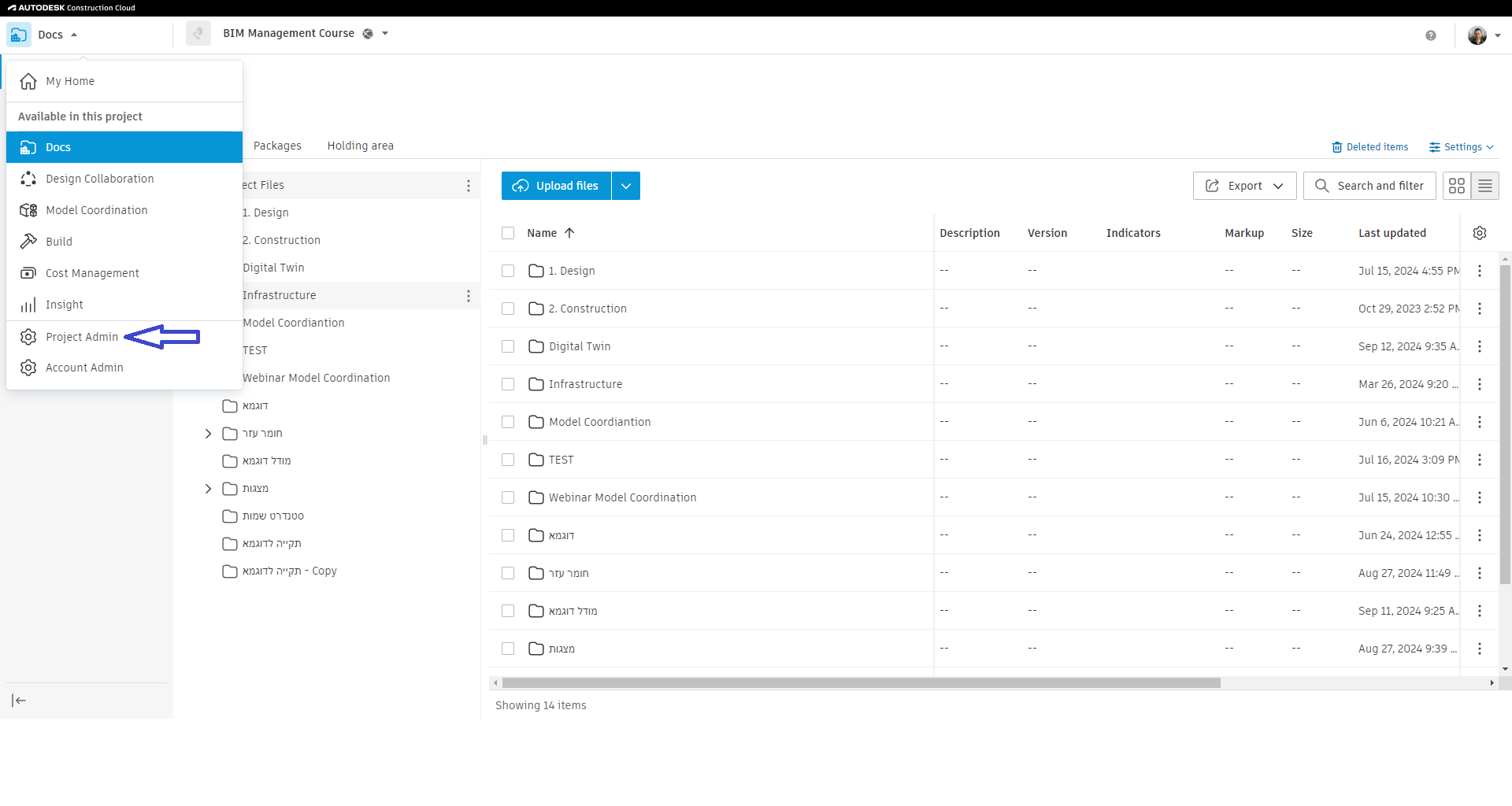
היכנסו לטיפ ולמדו על הגדרת אזורים בפרויקט ב- Autodesk Build
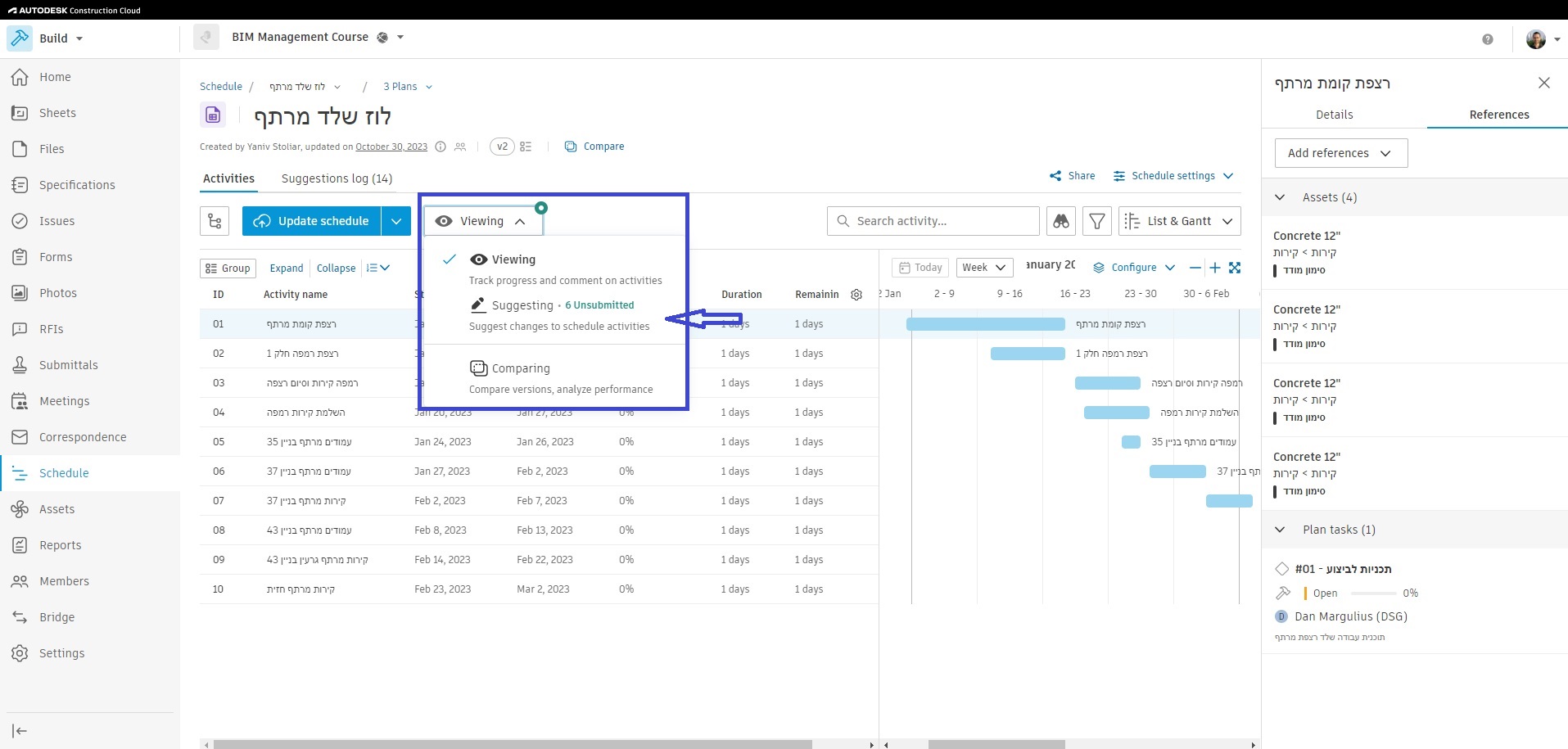
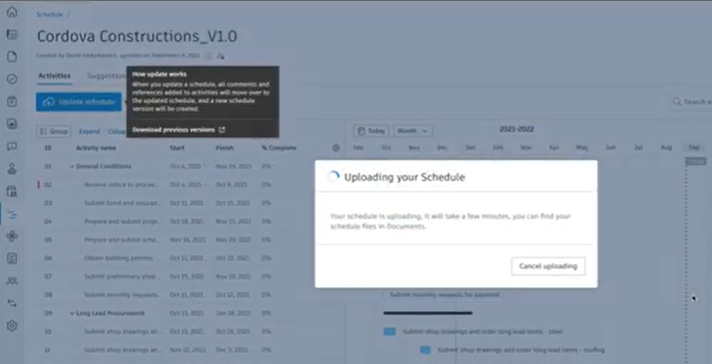
כלי לניהול לוחות זמנים ב Autodesk Construction Cloud? היכנסו לטיפ והכירו את Schedule
גלו כיצד ליצור תיק מתקן דיגיטלי מתקדם המקושר למודל ה-BIM באמצעות Autodesk Construction Cloud Build
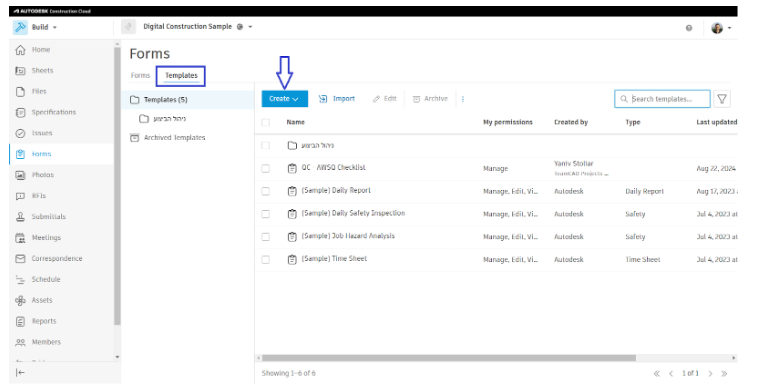
טיפ מומחה שיסייע לכם להפיק דוחות Report בענן Autodesk Construction Cloud
משתמשי ACC, עובדים עם קבצי DWG? המומחה יניב סטולר בטיפ שימושי להתאמת פונטים בעברית
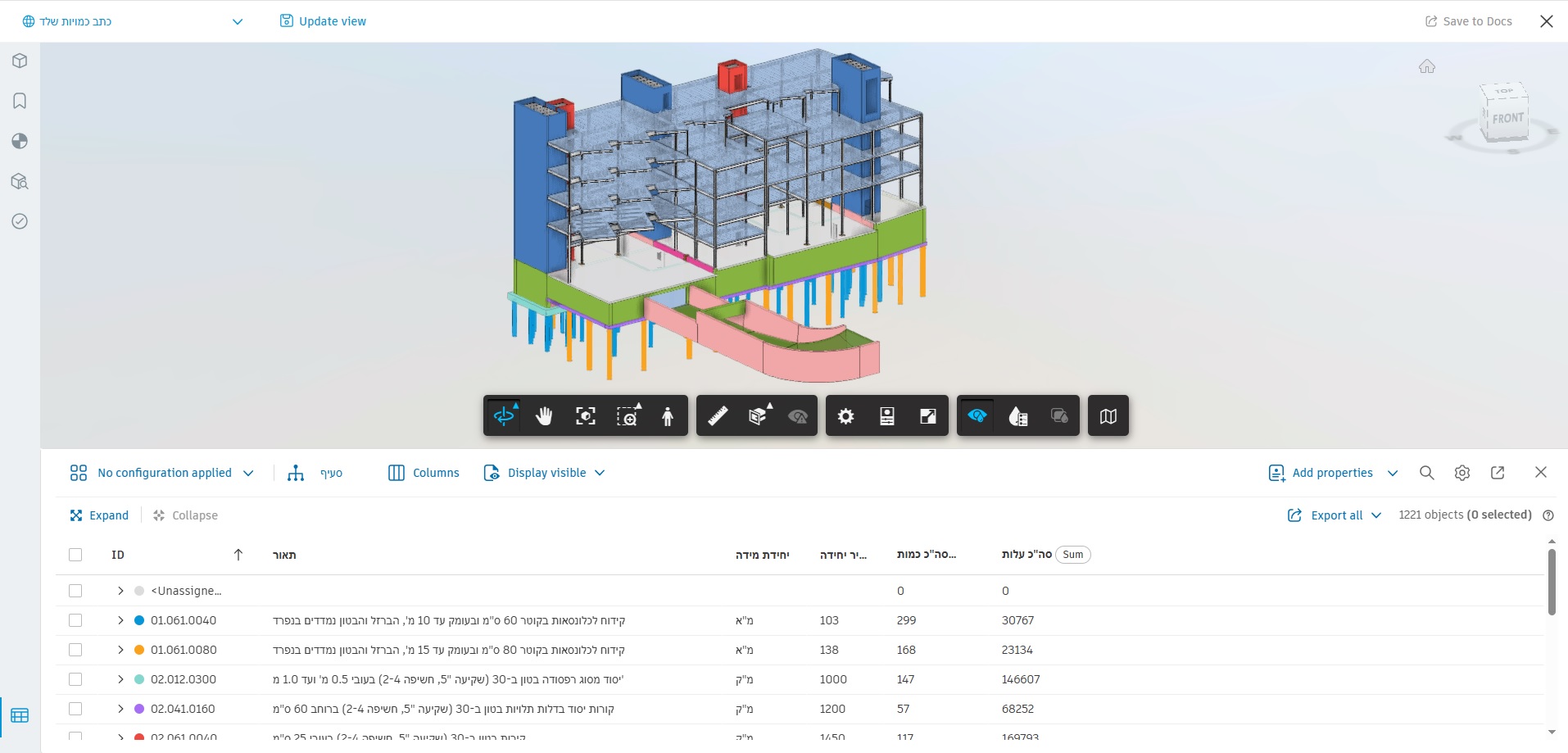
בעלי רישיון BIM Collaborate? בטיפ המומחה, יניב סטולר, תלמדו כיצד לחשב כמויות ביעילות על בסיס מודל ה BIM
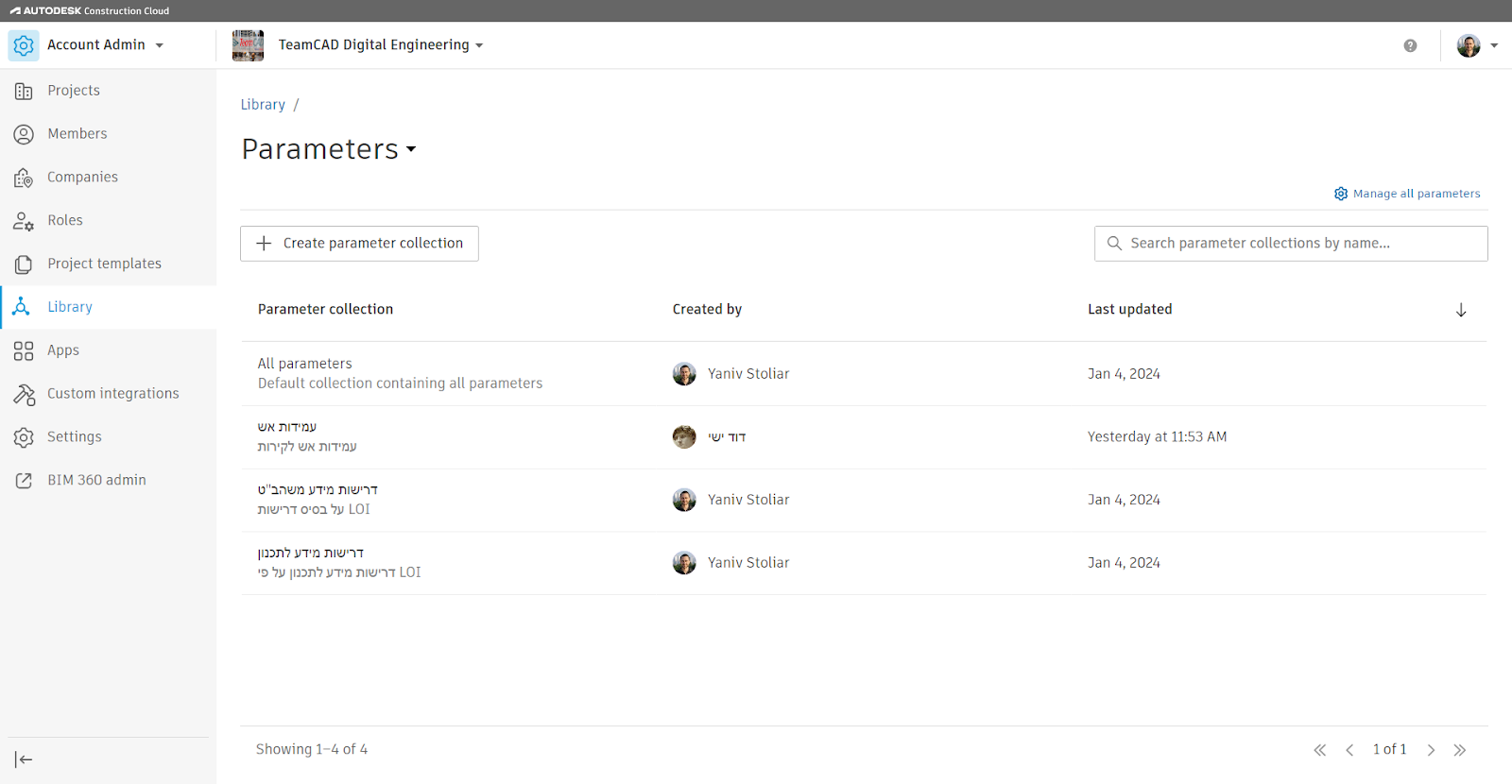
המומחה יניב סטולר בטיפ שיסייע לכם בבנית ספריית פרמטרים ארגונית Cloud Parameters Services
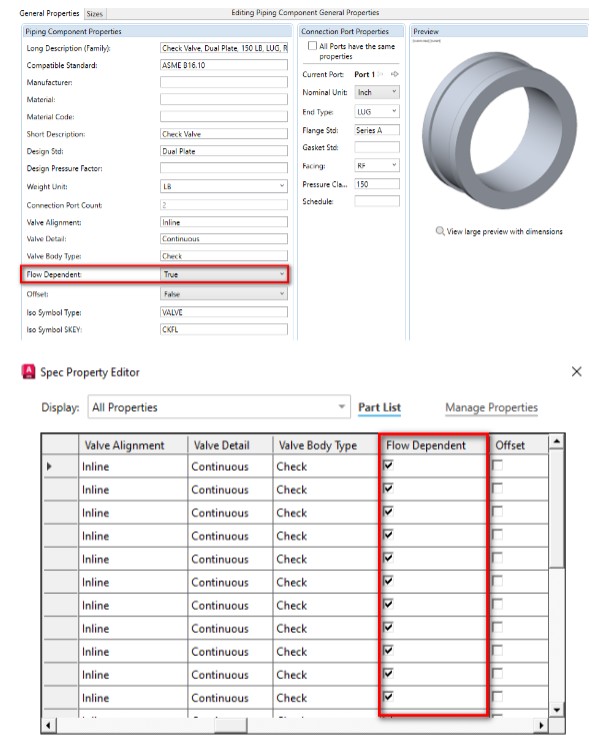
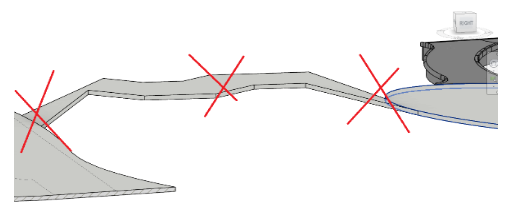
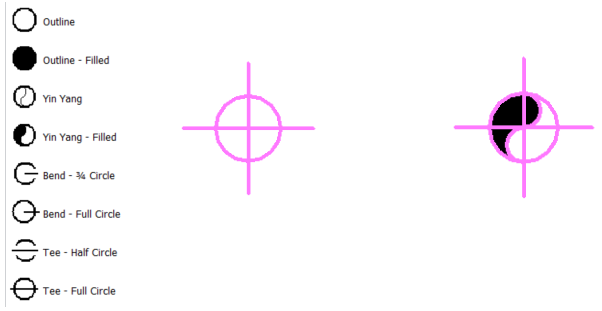
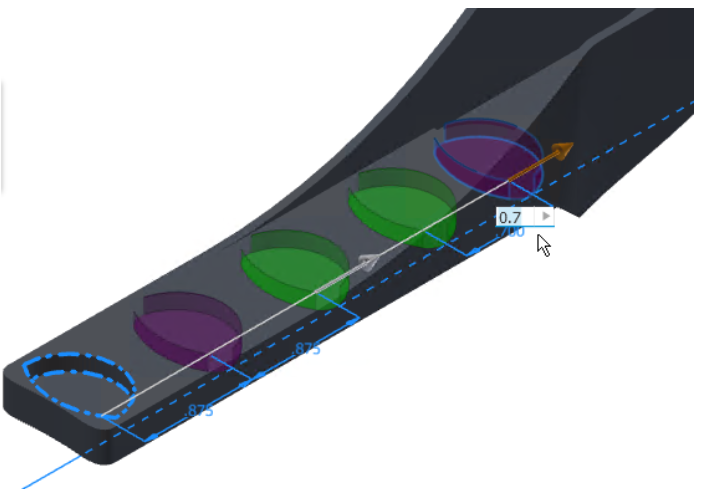
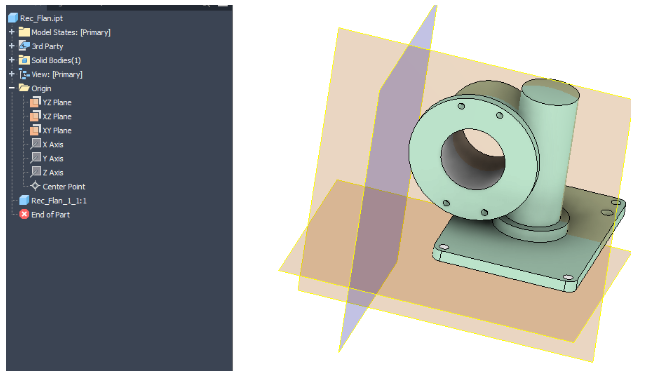
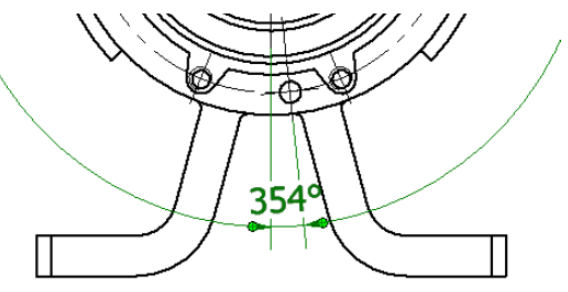
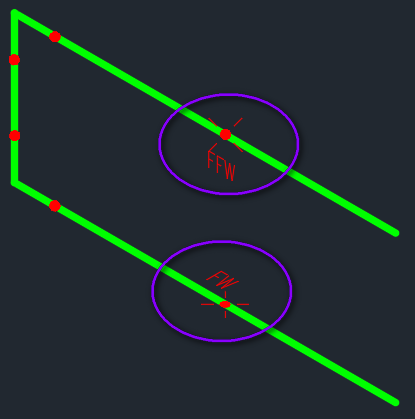
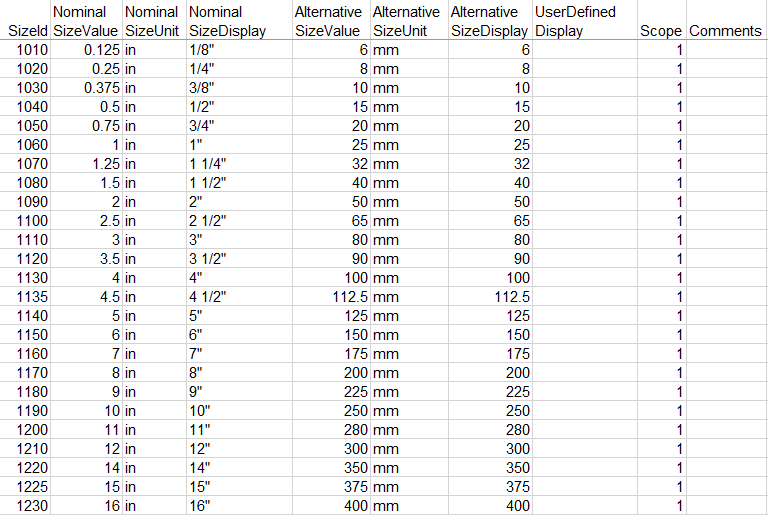
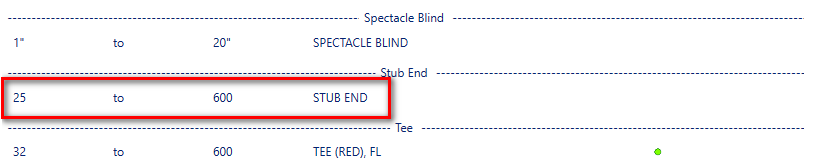
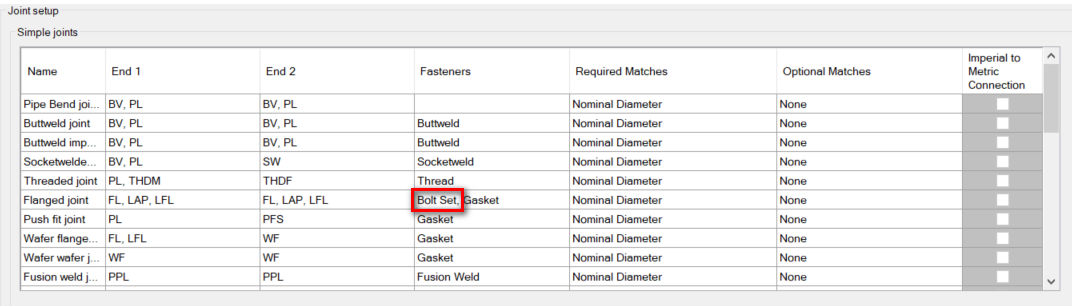
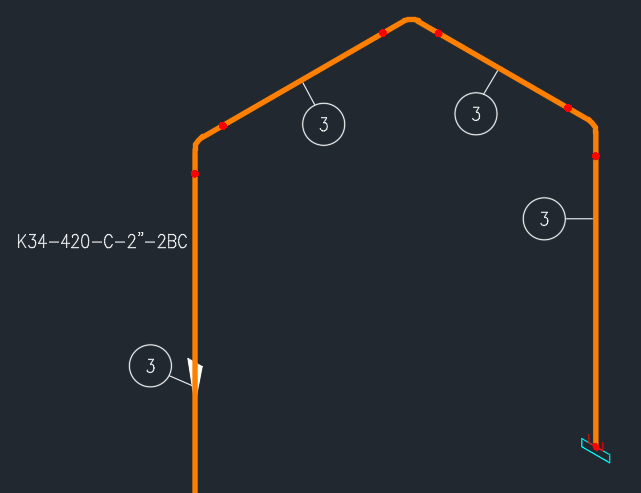
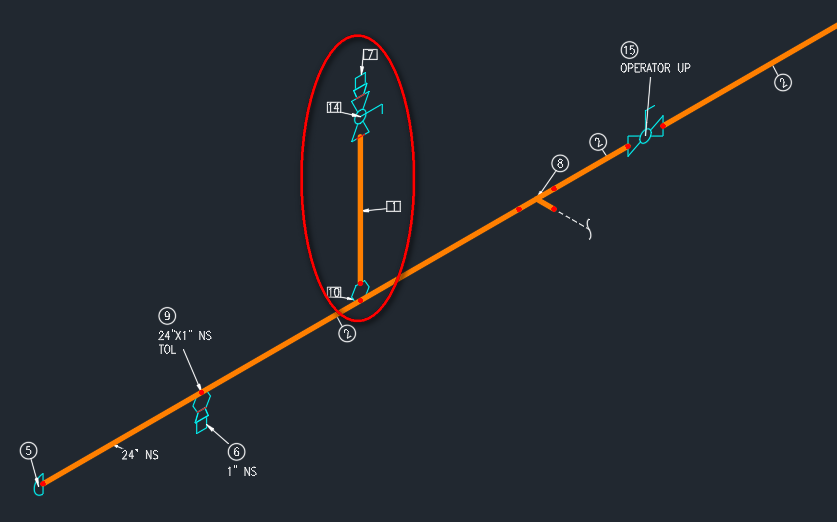
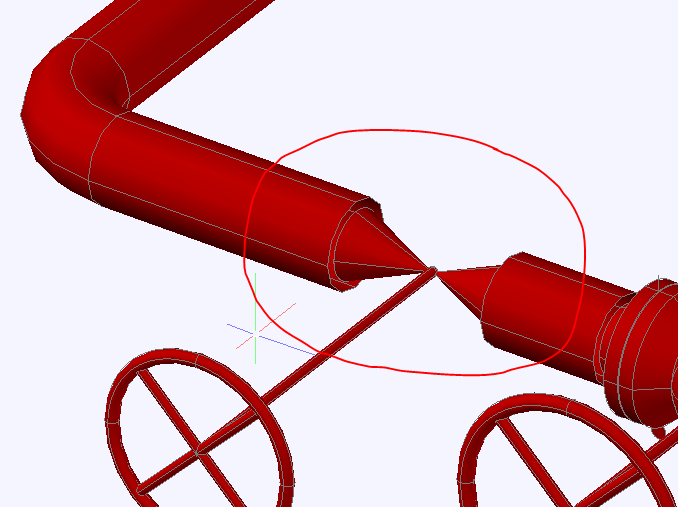
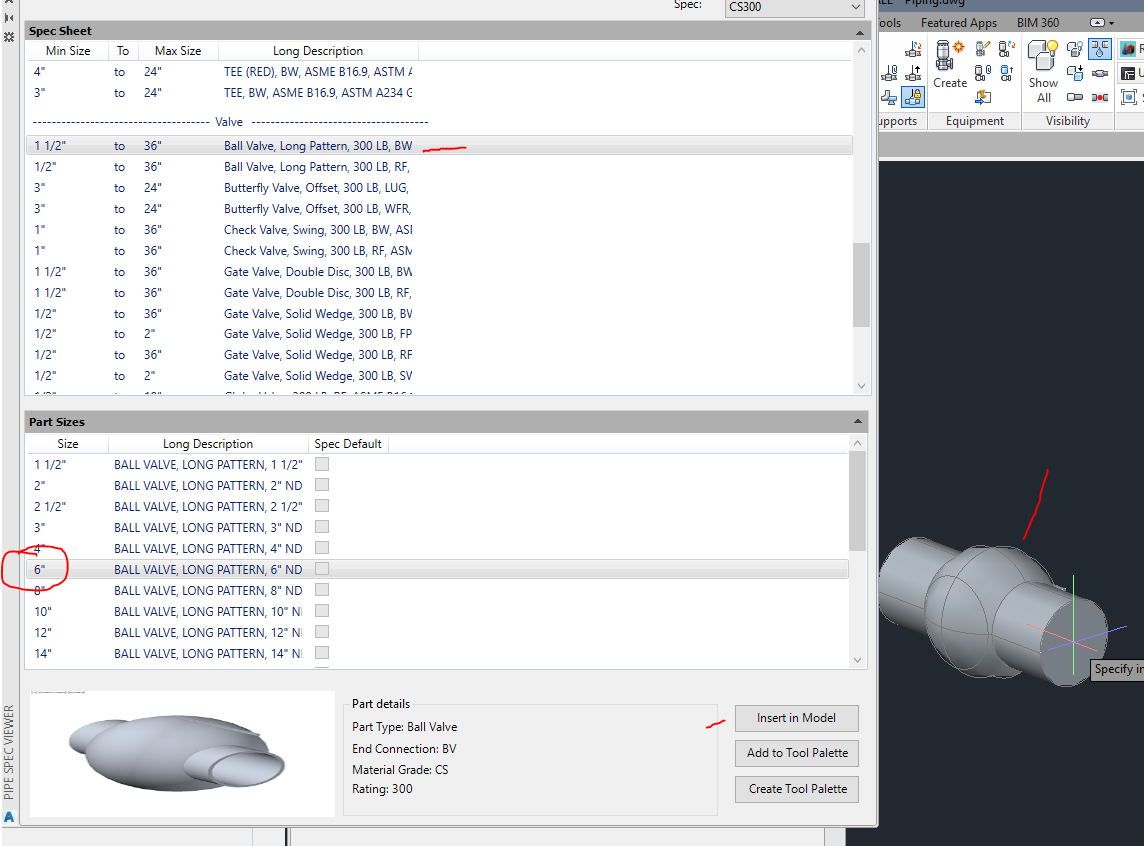
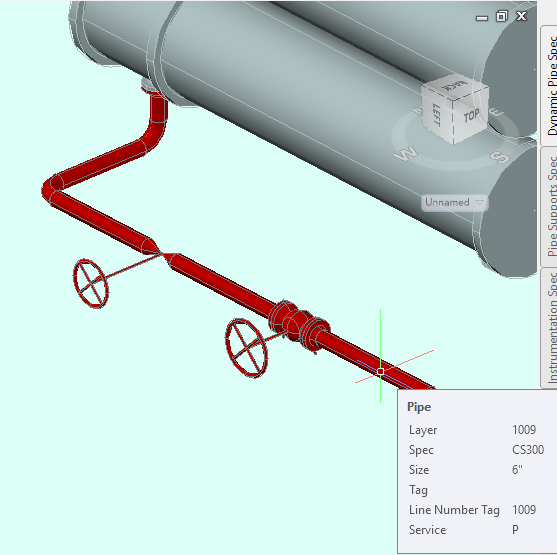
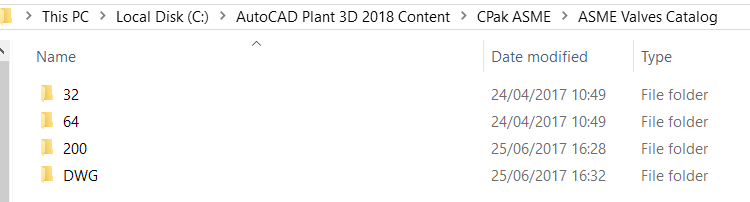
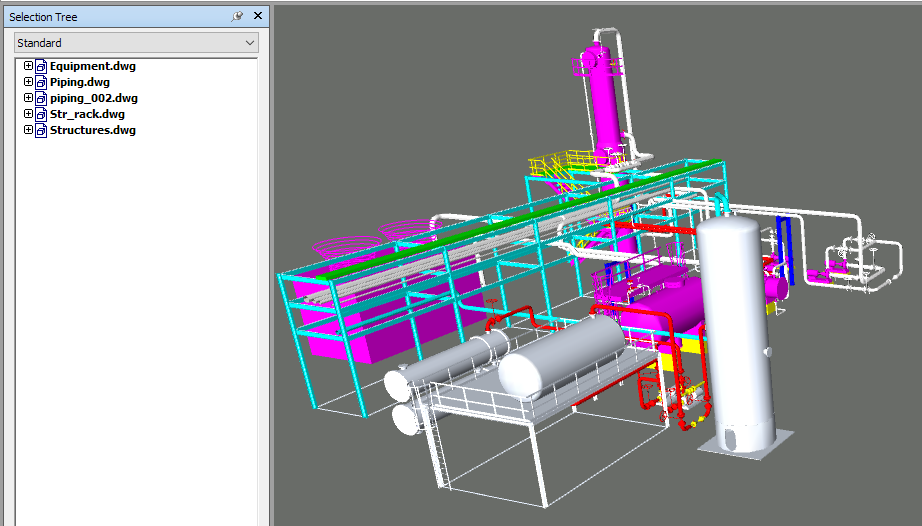
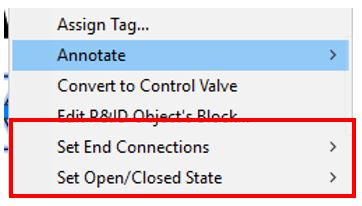
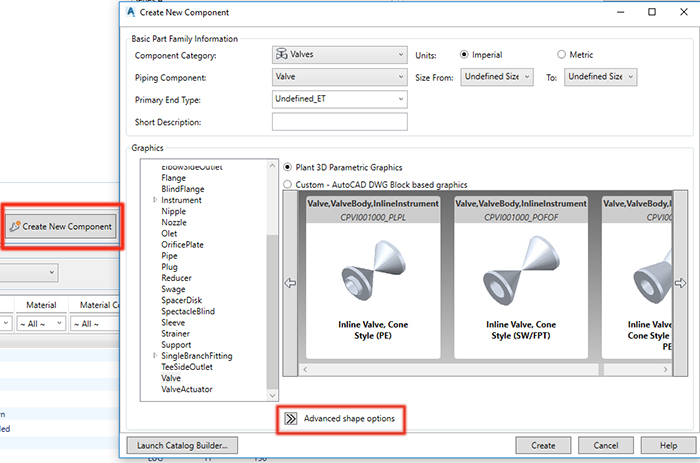
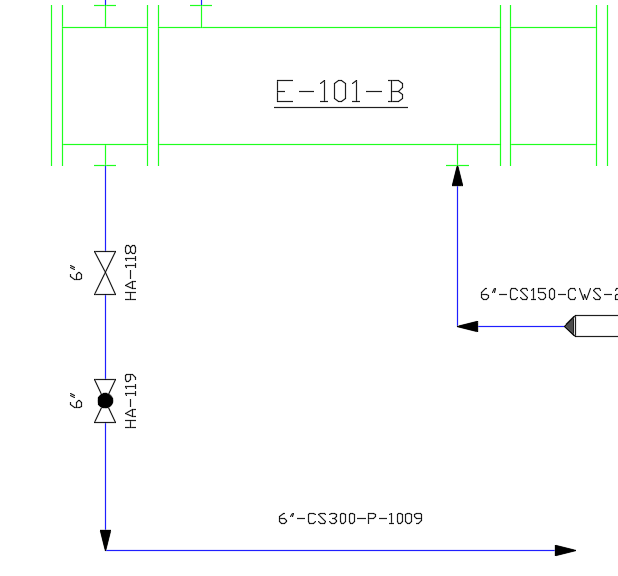
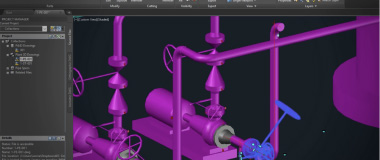
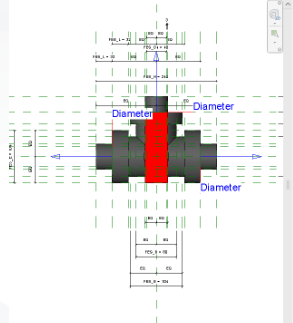
אל תחמיצו את טיפ המומחה של מקס בודובסקי לבניה ושימוש באביזרי צנרת בהם יש חשיבות לכיוון הזרימה, בואו ללמוד
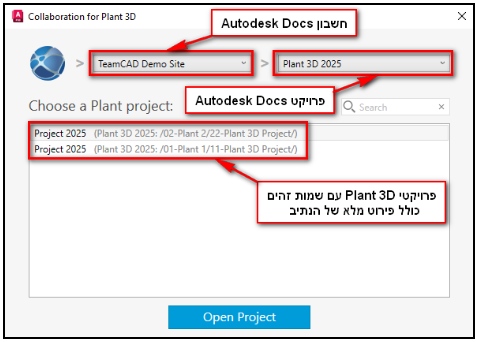
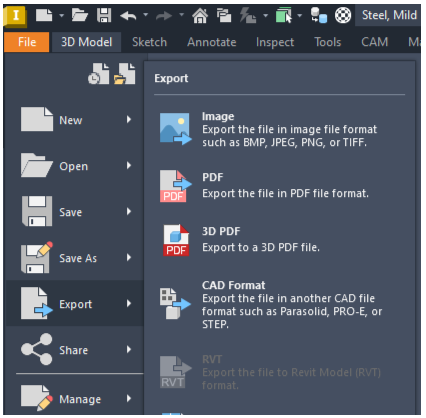
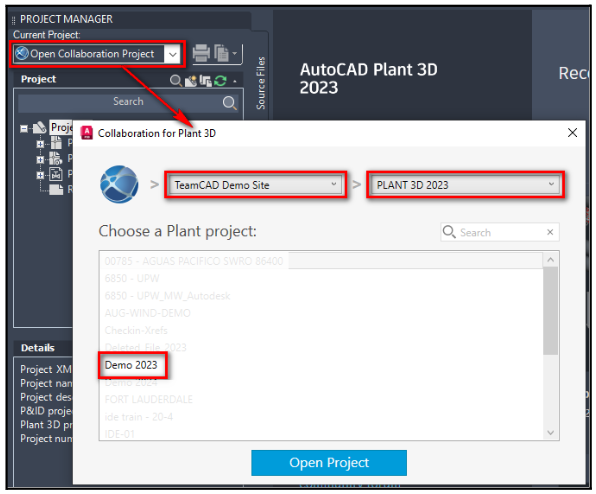
משתמשי Plant 3D, מהיום ניתן לשתף את הפרויקט היישר אל תיקיה ייעודית. היכנסו לטיפ המומחה של מקס בודובסקי ולמדו כיצד
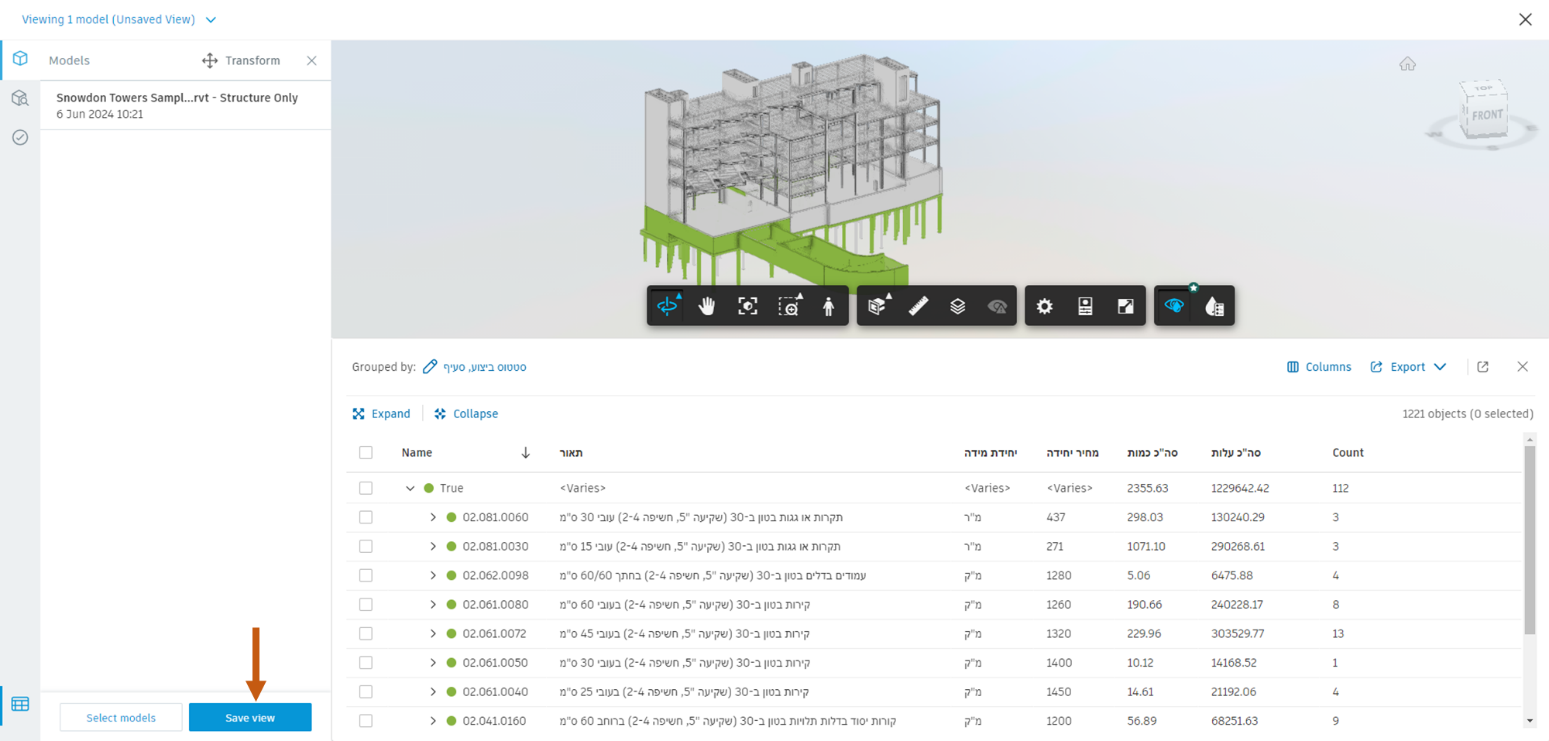
המומחה יניב סטולר על ה-Object Table שמירת מבט ישירות ל-Docs לשיתוף המודל הצבוע מבלי התלות ברישיון Model Cordination
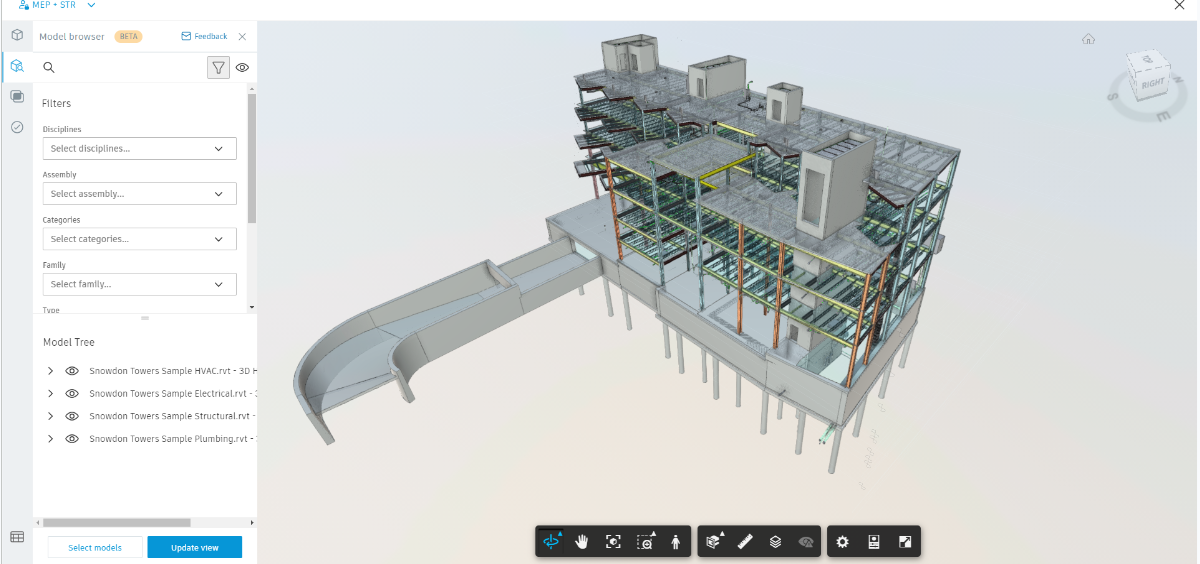
המומחה יניב סטולר בטיפ שיסייע לכם בחיפוש מידע במודל בענן באמצעות Autodesk Construction Cloud. בואו ללמוד

היכנסו לצפות בסרטון השלישי בסדרת הסרטונים החדשה, העוסק במודול DOCS - המודל הבסיסי, הנפוץ והמוכר ביותר לניהול שלב התכנון בענן
היכנסו לצפות בסרטון השני בסדרת הסרטונים החדשה, העוסק בענן החדש של Autodesk Construction Cloud
היכנסו לצפות בסרטון הראשון בסדרת הסרטונים החדשה שעוסקת בכלים החדשים של אוטודסק למנהלי פרויקטים, מנהלי תכנון ואנשי ביצוע
המומחה יניב סטולר בטיפ שיסייע לכם לצפות בהערות מענן ACC בתוכנות מידול BIM כדוגמת Revit. בואו ללמוד
המומחה יניב סטולר בטיפ שיסייע לכם לחלץ כמויות מהמודל בקלות, באמצעות פלפורמת ACC. בואו ללמוד
רוצים לשלוט ביכולות של תכנת השרטוט המתקדמת בעולם? דבי רוח משיח על קורס AutoCAD המספק בסיס עצמתי וכלים פרקטיים

דבי רוח משיח על קורס AutoCAD Electrical - בואו ללמוד כיצד לשדרג את היכולות הטכנולוגיות בתחום החשמל והבקרה

המומחה אור ברזילי מציג את החידושים ב- AutoCAD 2025 הכוללים Smart Blocks מבוססי AI ו־Sync Markups
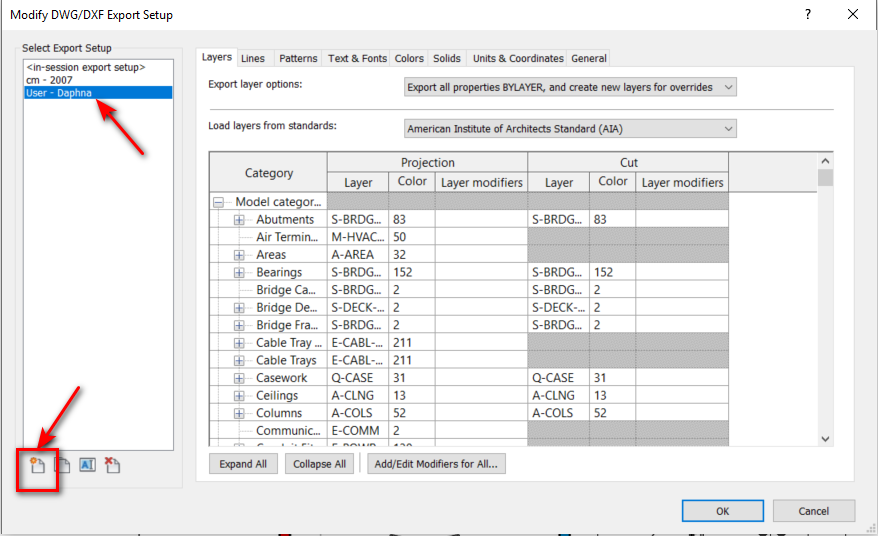
המומחית ליאת אבוחצירה, בטיפ על הפתרון המהיר להמרת שכבות משרטוט חיצוני, והתאמה לתקן שלכם והכל במס' צעדים פשוטים

המומחית ליאת אבוחצירה, בטיפ על המשתנים המשפיעים ביותר על דרך עבודת תוכנת ה-AutoCAD, בואו ללמוד ולחסוך זמן יקר
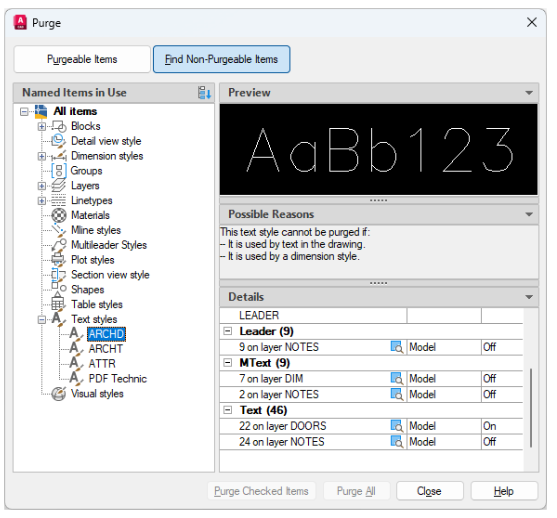
המומחית ליאת אבוחצירה, בטיפ על משמעות השינוי בפקודת Purge בגרסאות האחרונות של AutoCAD, בואו להכיר
המומחית ליאת אבוחצירה, בטיפ עם פיצ'רים קטנים ויעילים במיוחד שהתווספו ל-AutoCAD בשתי הגרסאות האחרונות, בואו להכיר!
טיפ שני בסדרה של המומחית, ליאת אבוחצירה, שתסייע לכם לעשות סדר ולקבוע סטנדרטים לעבודה יעילה בימים טרופים אלה

טיפ ראשון בסדרה של המומחית, ליאת אבוחצירה, שתסייע לכם לעשות סדר ולקבוע סטנדרטים לעבודה יעילה בימים טרופים אלו
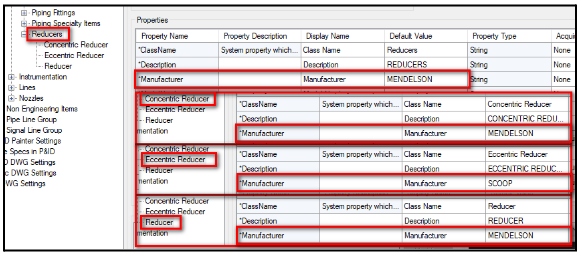
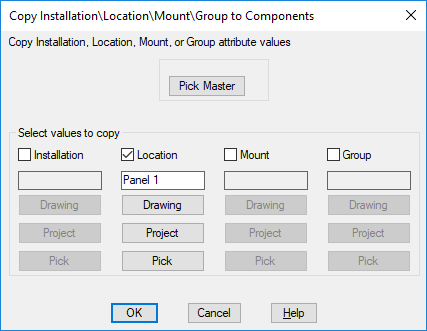
היכנסו לטיפ המומחה של מקס בודובסקי ותלמדו כיצד לשלוט בהורשת ערכי המאפיינים בהיררכיות השונות.
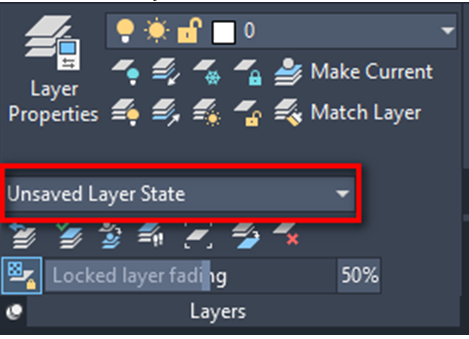
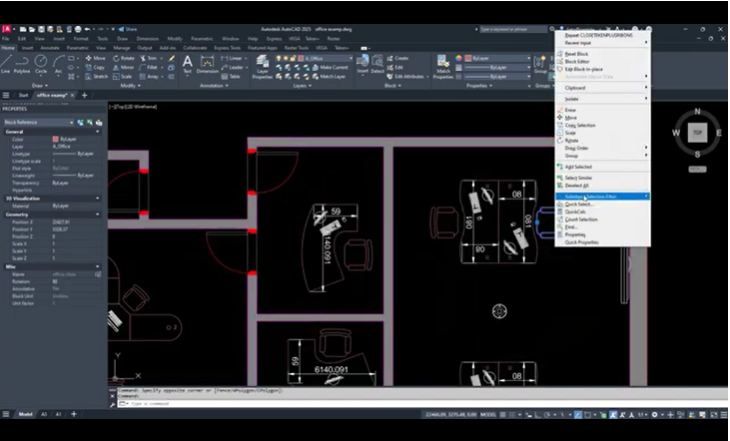
משתמשים ב-AutoCAD? בואו ללמוד בטיפ המומחה של מקס בודובסקי כיצד לנהל מצבי שכבות
גלו על הפיצ'רים החדשים ב-AutoCAD המשלבים בינה מלאכותית בטיפ שלפניכם
הטיפ שלפניכם שם זרקור על פיצ'ר אחד מכל אפליקציה בתוך חבילת TekenPlus, היכנסו וגלו!
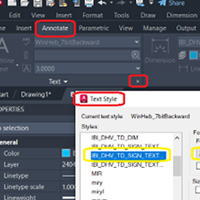
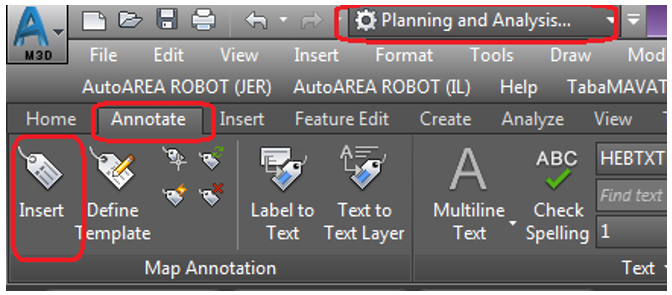
תוכנת ה-AutoCAD היא אמנם תוכנת שרטוט, אך לעיתים אנו נדרשים גם להוסיף טקסטים לתיאורים שונים.
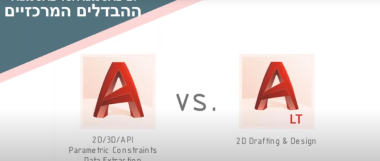
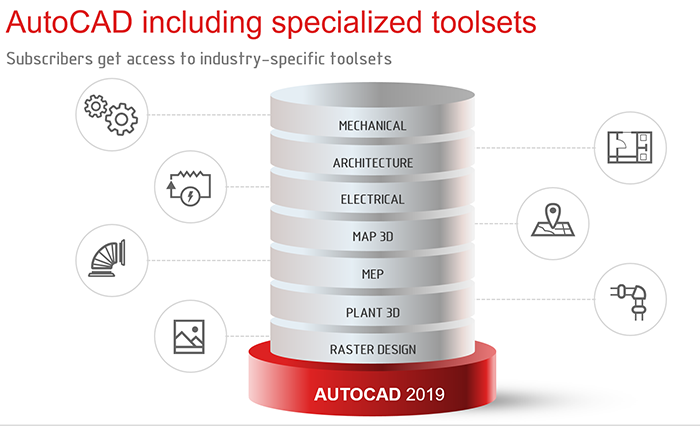
וובינר מקצועי העוסק בהבדלים המהותיים וביתרונות שמעניקה אוטוקאד לעומת גרסת ה-LT
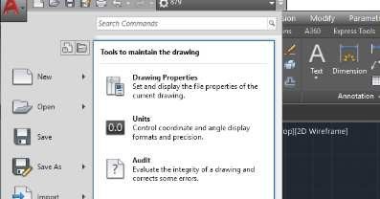
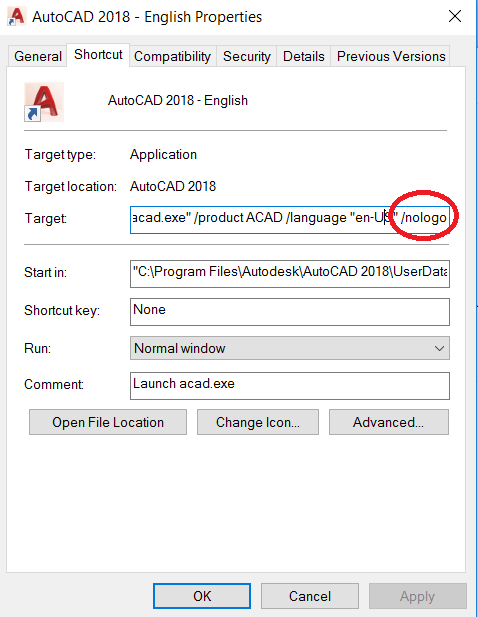
מספר פעולות שעשויות לעזור על מנת למנוע תקלות ובעיות שונות באוטוקאד
דבי רוח משיח על קורס AutoCAD Electrical - בואו ללמוד כיצד לשדרג את היכולות הטכנולוגיות בתחום החשמל והבקרה
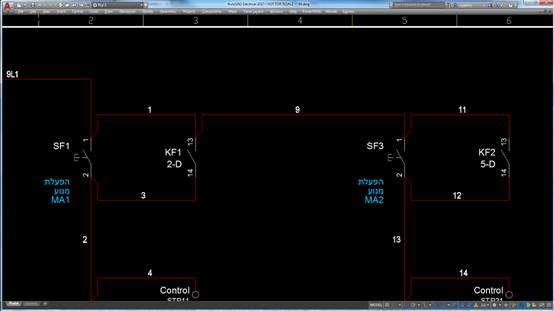
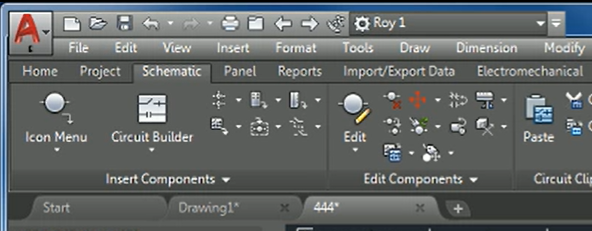
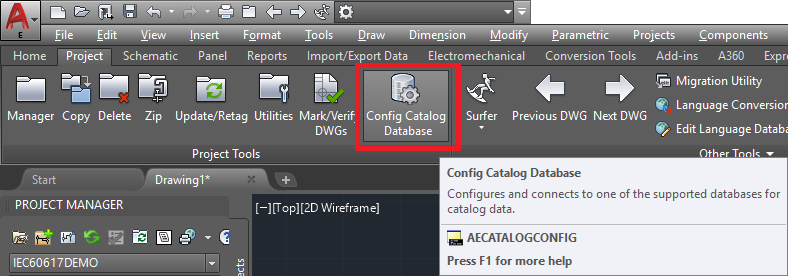
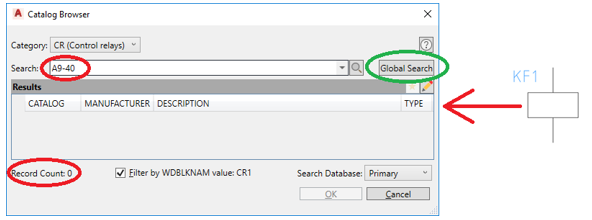
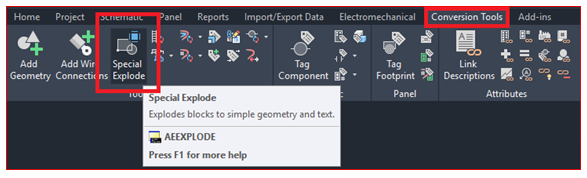
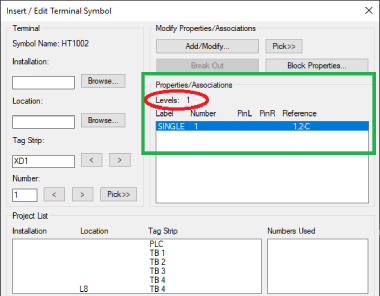
היכנסו לטיפ המומחה של דני מרגוליס, המסביר כיצד להמיר שרטוטי אוטוקאד רגילים לאובייקטים של AutoCAD Electrical.
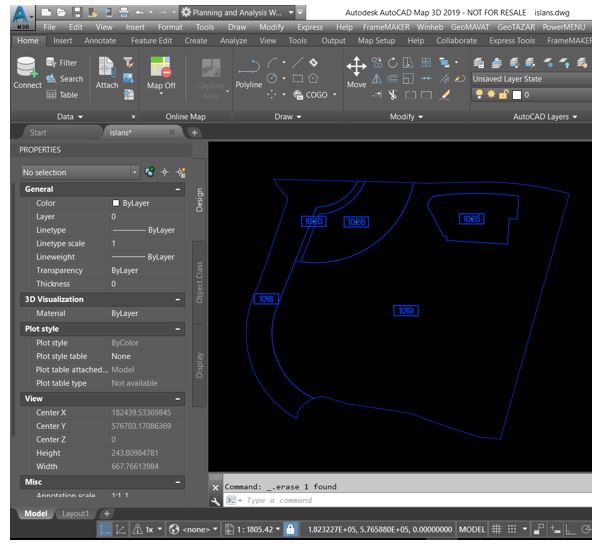
מתוך מחשבה על טובת לקוחותינו ומיקסום נוחות השימוש ב-AutoCAD Map 3D, יצרנו template חדש המכיל בתוכו הגדרות וכלים לשימוש

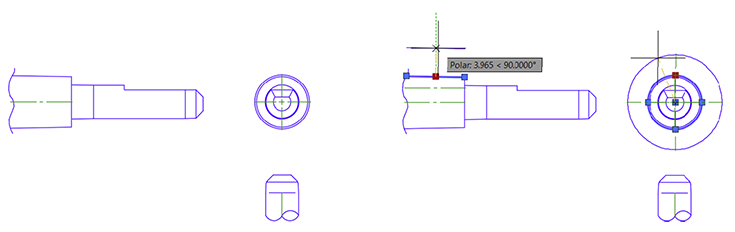
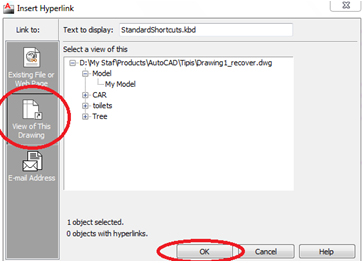
כיצד ניתן לבצע ניקוי מקיף לקובץ על ידי העתקה נקייה ל-template חדש?

תוכנת ה-AutoCAD Map 3D מציעה לנו כלים מצויינים לעריכה וניקוי שרטוטים. בטיפ זה נציג שני כלים, הנקראים Boundary Trim ו- Boundary Break
האם קיבלתם פעם תיקיות GDB ולא ידעתם איך להביא אותם ל- AutoCAD Map 3D? בטיפ זה נסביר את האופציות לעבודה עם תיקיות אלה
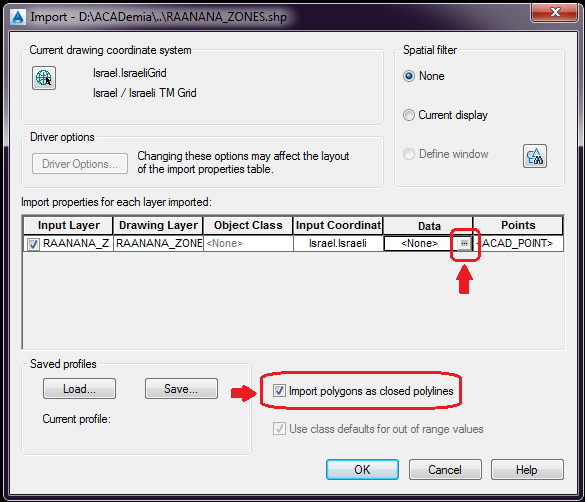
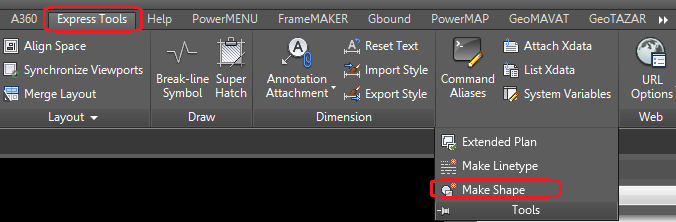
היכנסו לטיפ על מנת ללמוד מה הן האפשרויות הנוספות בפעולת הייבוא של קבצי Shape
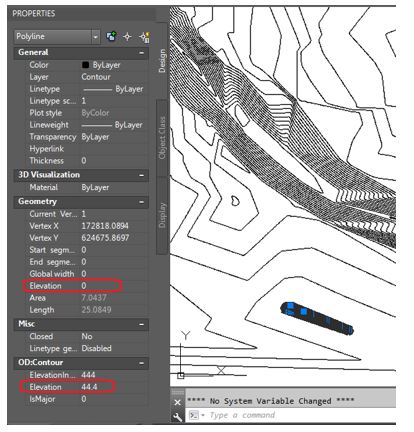
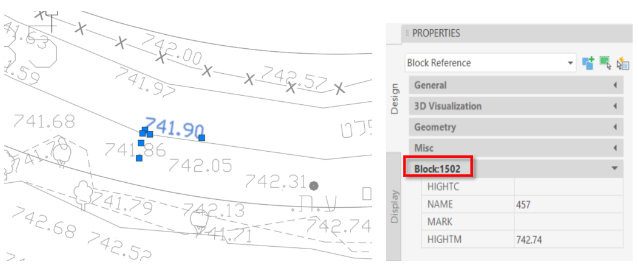
היכנסו לטיפ המומחה של ליאת אבוחצירה ותלמדו כיצד להשתמש במידע קיים כדי לקבל גובה ממשי
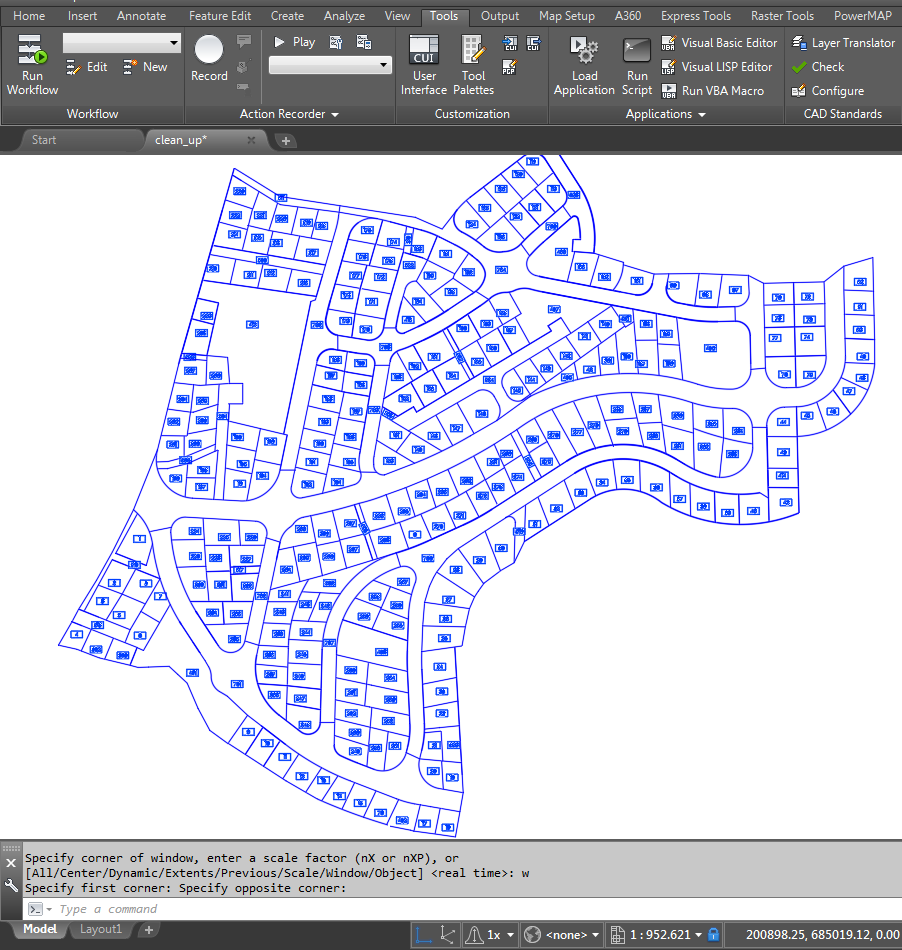
בעזרת פעולת ה-Clean Up אנחנו יכולים לנקות את הקבצים ולהכינם לסגירה
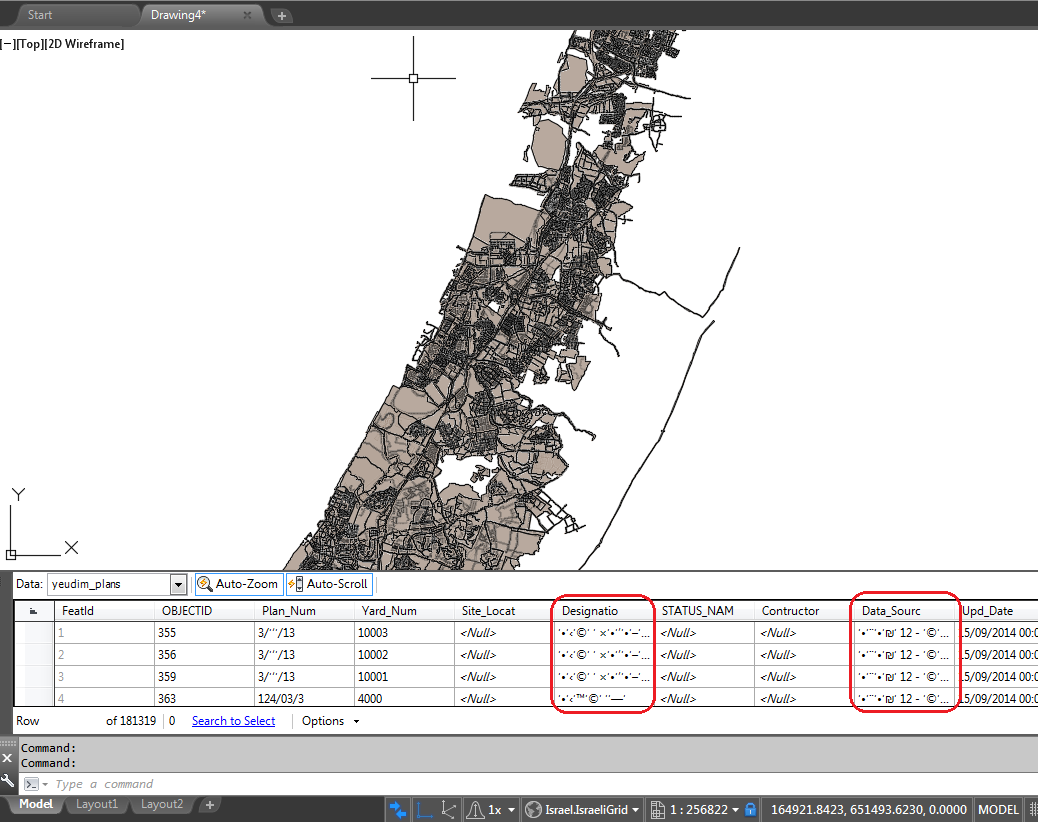
כפי שאתם יודעים, השפה הרשמית כאן בארץ היא לא קלה לעיכול לתוכנות מסויימות. בטיפ זה יוצגו שתי בעיות מוכרות ואת הפתרון לבעיות אלו
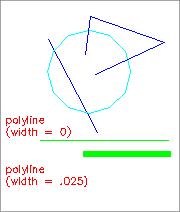
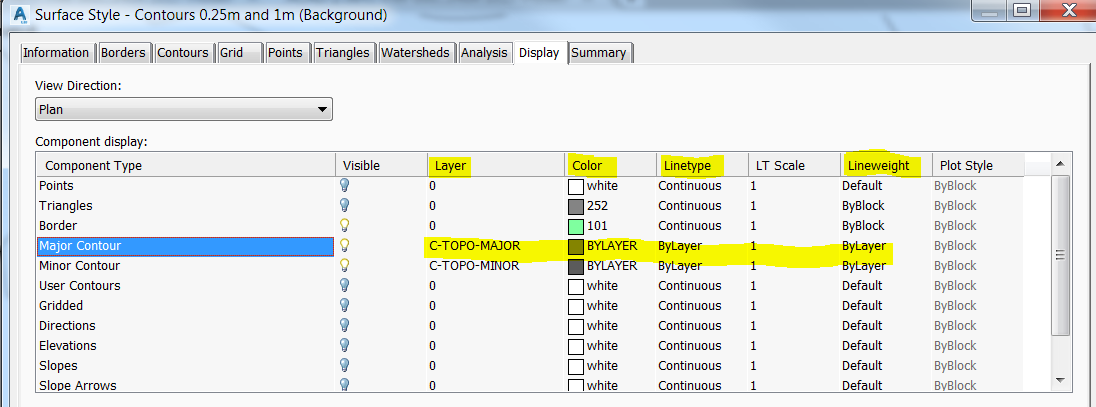
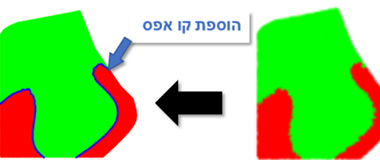
ב-AutoCAD ניתן לייצר סוגי קווים לפי הצורך שלנו, זה עוזר לנו לפשט את התוכנית ויזואלית, וגם ניתן להיעזר בזה למציאת כיוון קו
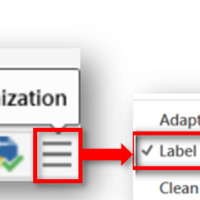
טיפ זה יסייע לכם להוסיף את התפריטים הקלאסיים שאליהם התרגלנו בגרסאות הקודמות, לסביבת עבודה שהיא לא Map Classic Workspace
גלו על הפיצ'רים החדשים ב-AutoCAD המשלבים בינה מלאכותית בטיפ שלפניכם
הטיפ שלפניכם שם זרקור על פיצ'ר אחד מכל אפליקציה בתוך חבילת TekenPlus, היכנסו וגלו!
"רוויט בתוך האוטוקאד"- היכנסו וגלו את הפיצ'רים באפליקציית Power Menu
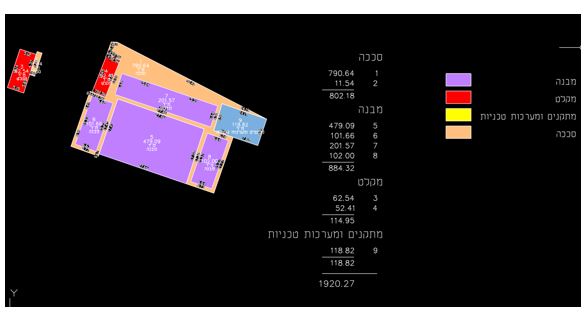
כיצד מקבלים תכנית שטחים בעזרת אפליקציית Power Menu? היכנסו לטיפ וגלו
מכיוון שבאוטוקאד אנחנו עובדים בשיטה של פוליליינים סגורים, אנחנו נתקלים בבעיה כשאנחנו רוצים לייצא ל-GIS חלקה אשר נמצאת בתוך חלקה אחרת. היכנסו ללמוד מהו הפתרון
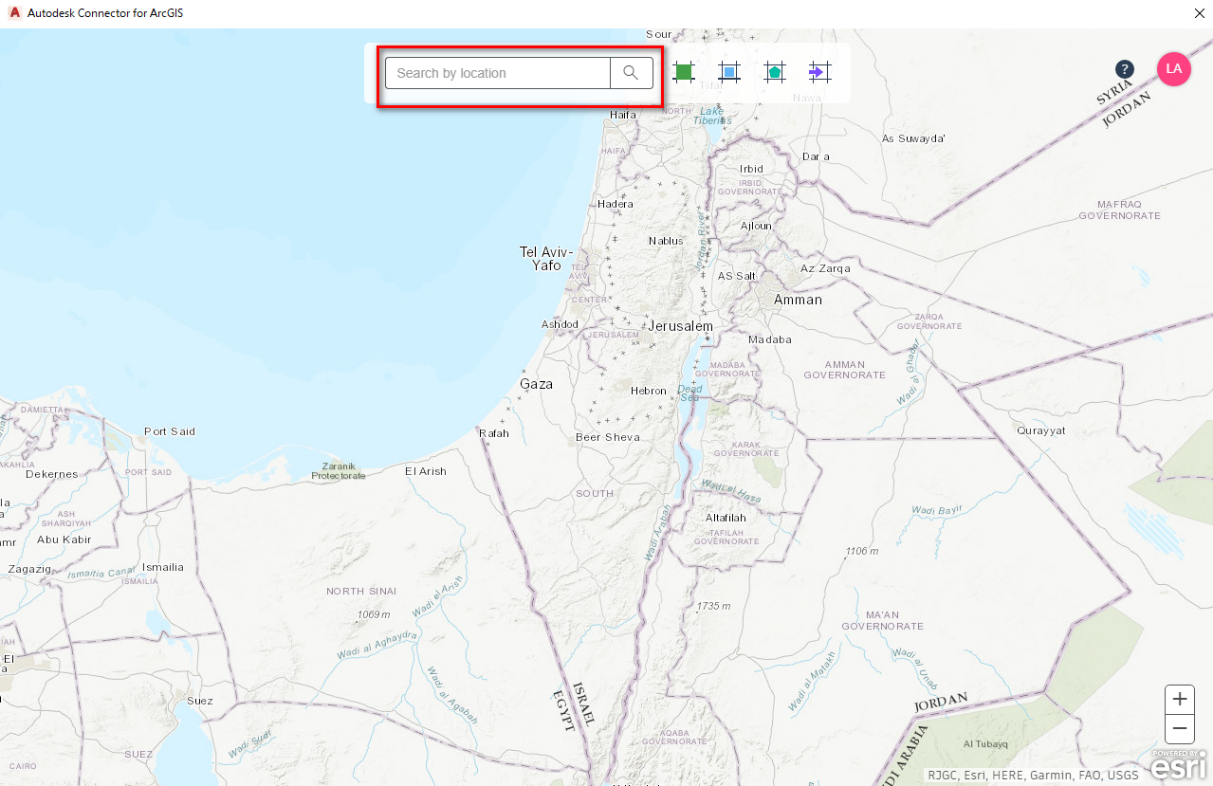
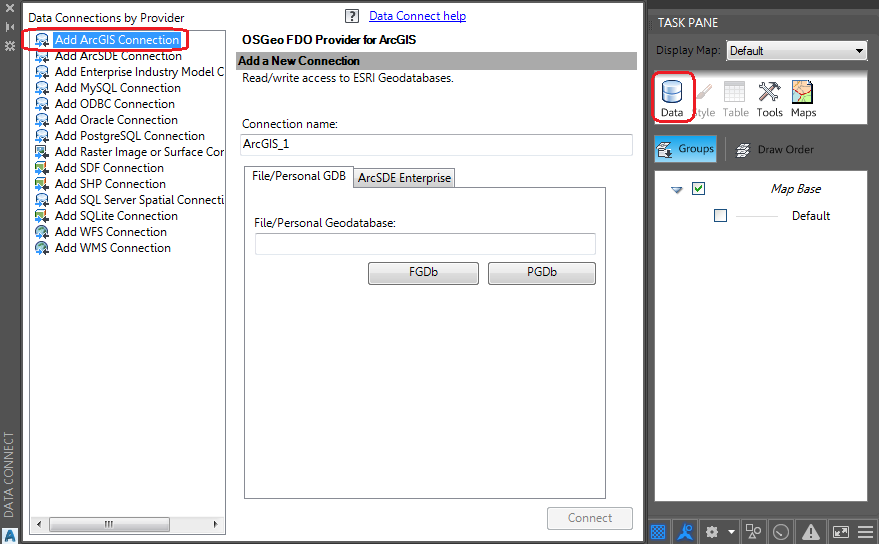
כיצד ניתן להתחבר למאגרי המידע של ה-ArcGIS Online?
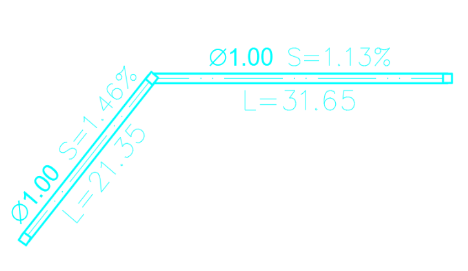
היכנסו לטיפ המומחה של ליאת אבוחצירה ותלמדו כיצד ניתן לייצר קווי גובה ב- AutoCAD Map 3D
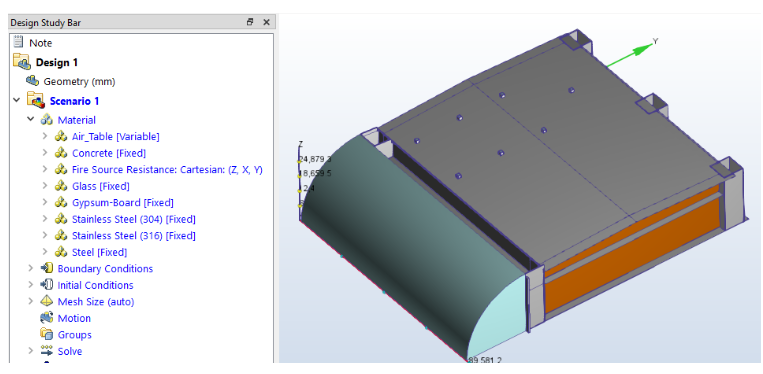
היכנסו להתעדכן בטיפ המומחה של אלעד מוסקוביץ' על ביצוע חישובי זרימה במודלים באמצעות תכנת Autodesk CFD בקלות ויעילות
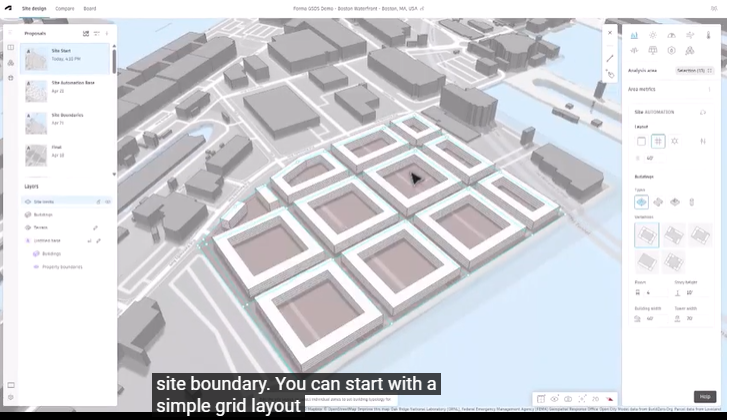
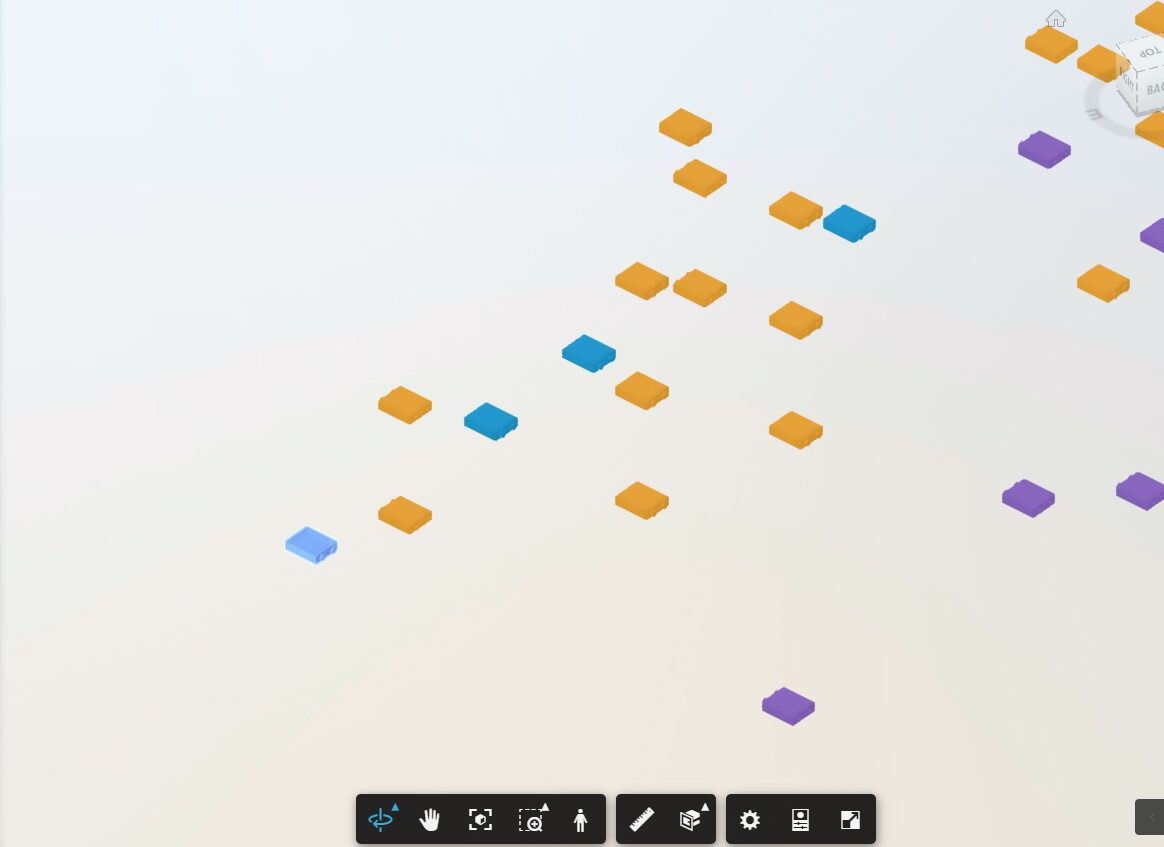
המומחית רעות בן יהודה על Autodesk Forma לייעול שלבי התכנון המוקדמים עם הצעות עיצוב מיידיות, ניתוח אילוצים ותרחישי השוואה חכמים
גלו על הפיצ'רים החדשים ב-AutoCAD המשלבים בינה מלאכותית בטיפ שלפניכם

בואו ללמוד בטיפ של אור ברזילי אילו הגדרות חובה לבצע ב-Civil 3D על מנת שה-Civil Tool יאפשר צפיה מדויקת בצירי הפרויקט בענן

המומחה אור ברזילי בטיפ אודות ה-Civil Tools ב-ACC. בואו ולהנות מגישה ישירה למידע ממודל בענן: בדיקות, מדידות וחתכים בלחיצה אחת.
דבי רוח משיח עם פרטים מלאים על הקורס החדש למידול תשתיות תת-קרקע בשיטת BIM, אל תחמיצו, בואו להתעדכן
משתמשי Civil 3D בואו ללמוד בטיפ המומחה של אור ברזילי כיצד לארגן Subassemblies באופן חכם ויעיל לשמירה על מודל איכותי וגמיש
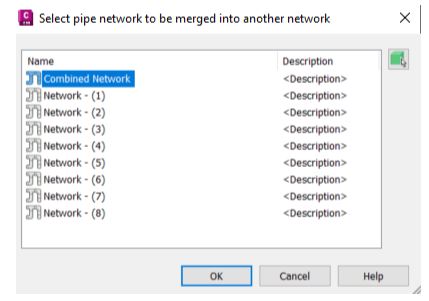
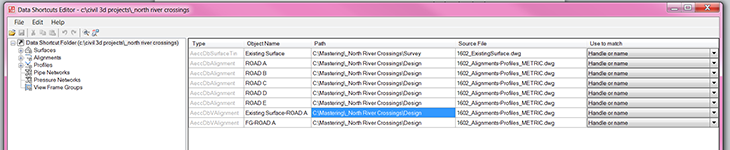
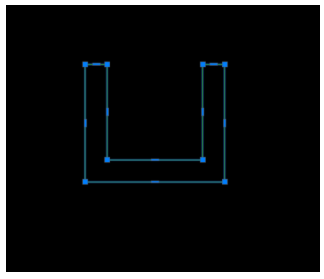
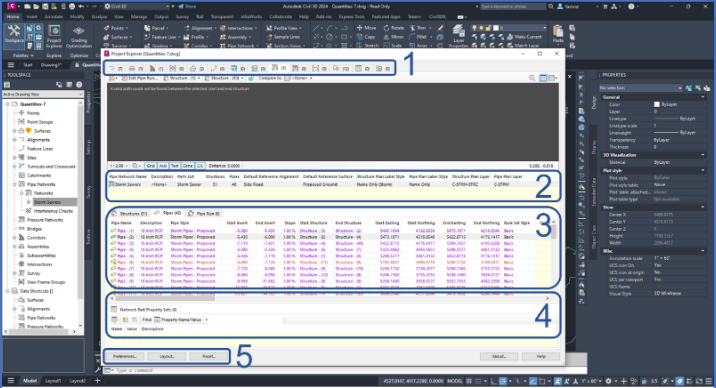
משתמשי Civil 3D בואו ללמוד כיצד לאחד מערכות, לחסוך טעויות ולשפר את ניהול המידע בפרויקט
משתמשי Civil 3D בואו ללמוד בטיפ המומחה של אור ברזילי על פקודת Grading לתכנון יעיל של חניונים, מאגרים ומגרשים

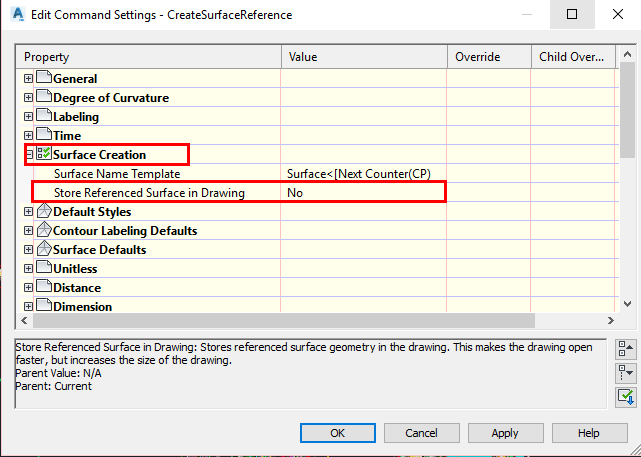
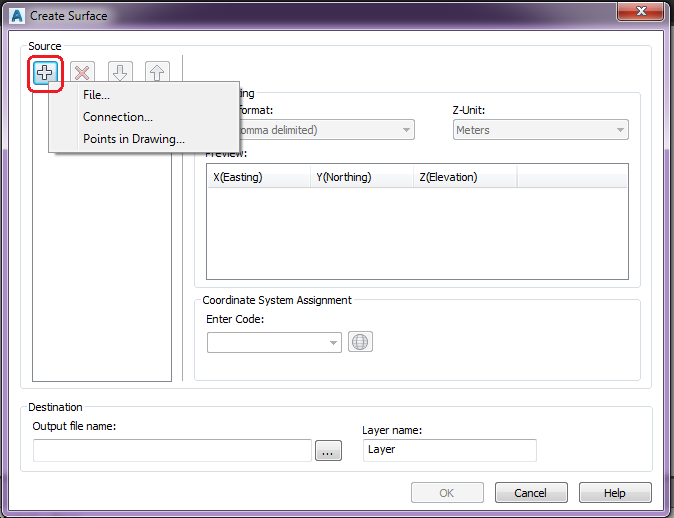
היכנסו לטיפ המומחה של איתן בר לוי ותלמדו כיצד ליצור משטח ולהימנע מטעויות הנובעות משימוש בפרמטרים
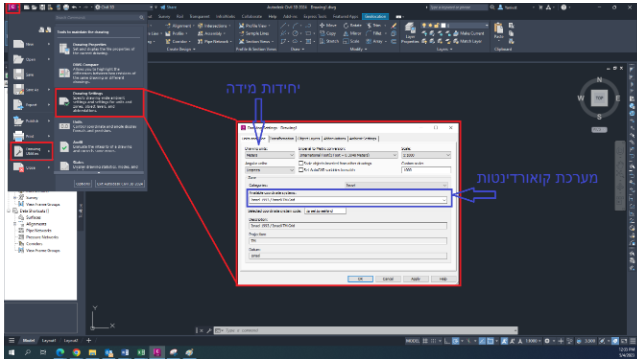
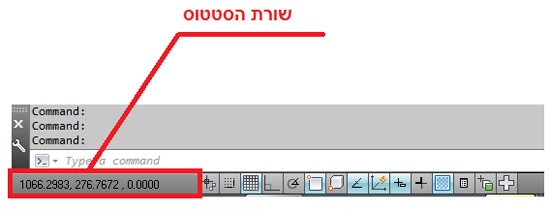
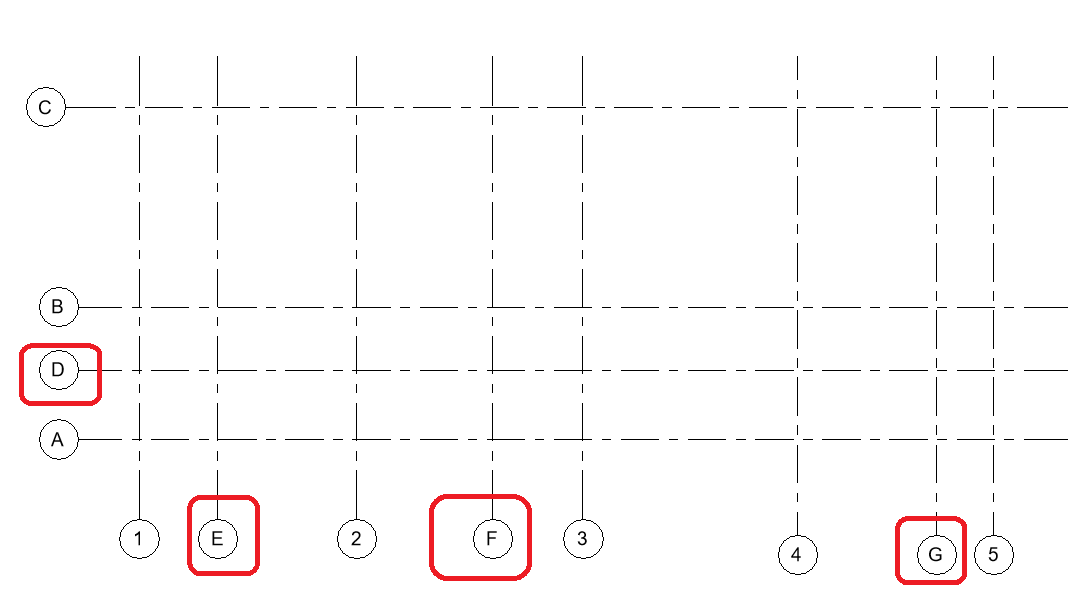
המומחה יניב סטולר עם טיפ שימושי ליצירת קוארדינטות מוקפדות שיסייעו לכם לבנות ולתחזק מודל אחיד ומתואם. בואו ללמוד
בואו ללמוד בטיפ המומחה של איתן בר לוי, כיצד ליצור משטח (Surface) מנקודות מדידה וקווי אי רציפות ב- Civil3D
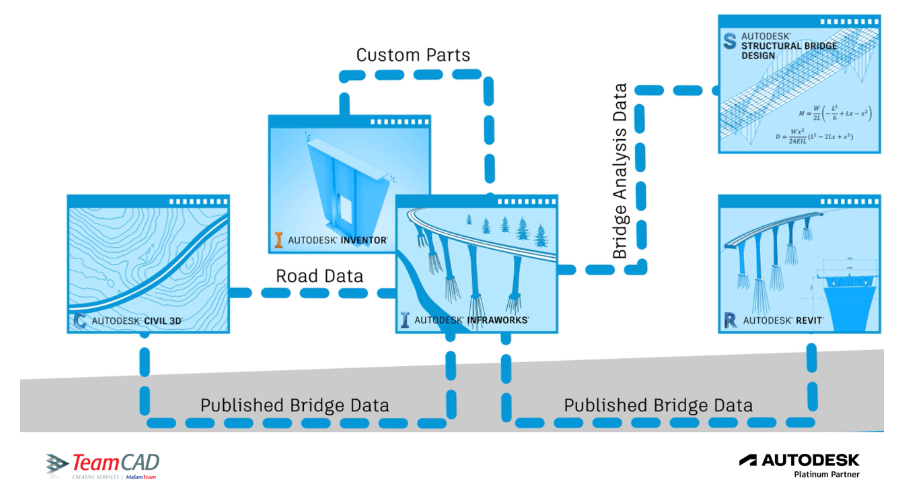
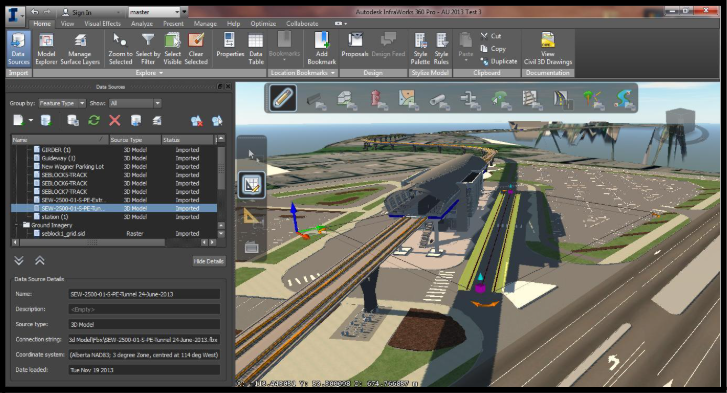
המומחה יניב סטולר מגלה את סודות ה-BIM! בואו ללמוד כיצד למדל גשר ב-Infraworks ולייצא ל-Civil3D ו-Revit
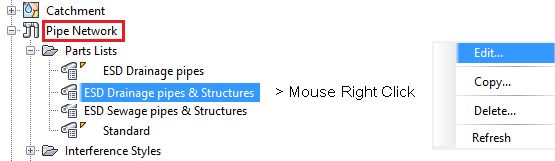
היכנסו לטיפ המומחה של איתן בר לוי בנושא הוספת אובייקטים לרשימות צנרת
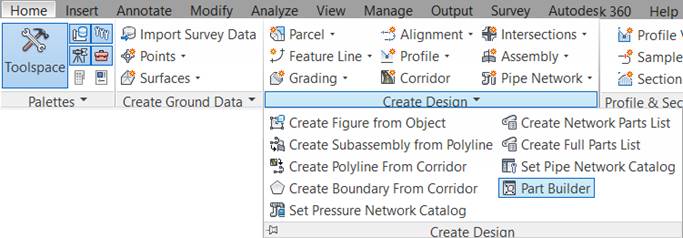
היכנסו ללמוד על פקודת Part Builder בטיפ המומחה של איתן בר לוי
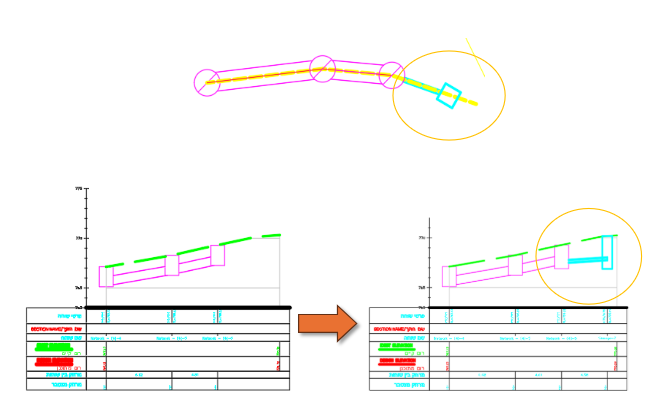
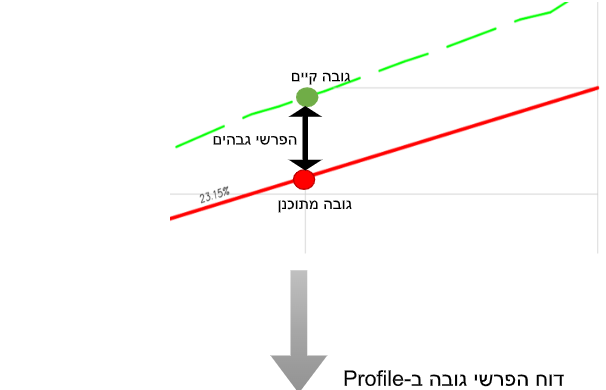
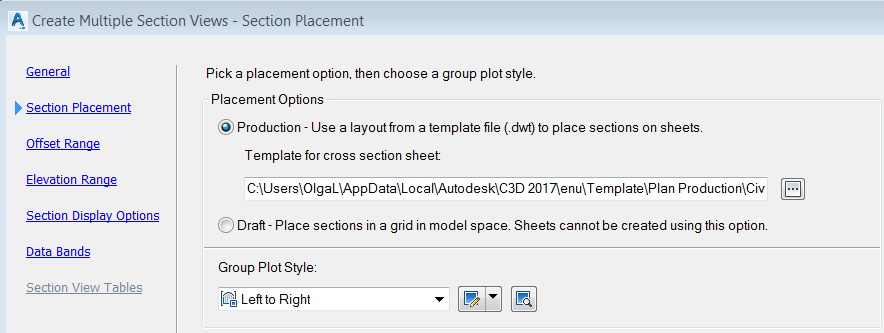
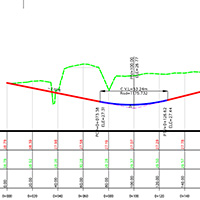
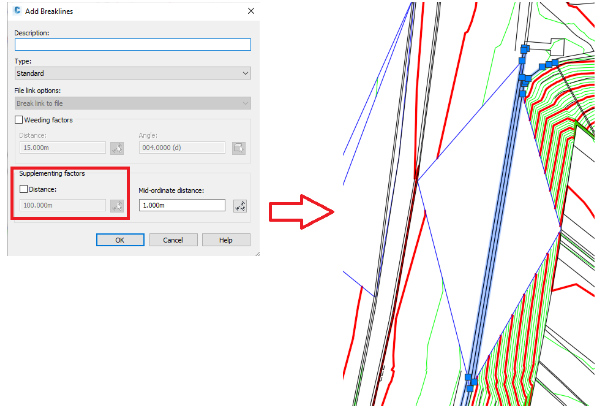
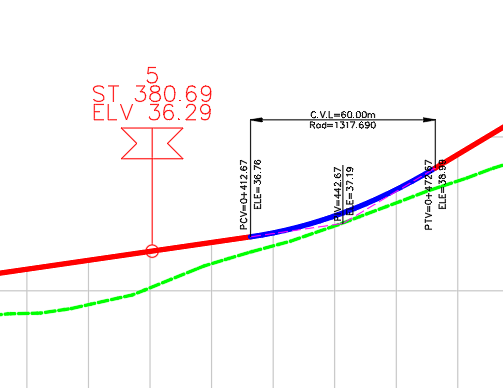
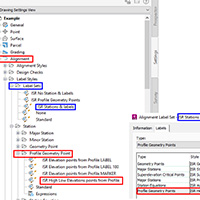
הוספת גבהי חתכים בתנוחה תלויה בשני גורמים, היכנסו לקרוא מה הם
היכנסו לטיפ המומחה של איתן בר לוי כדי ללמוד כיצד להוסיף SubAssembly לשרטוט
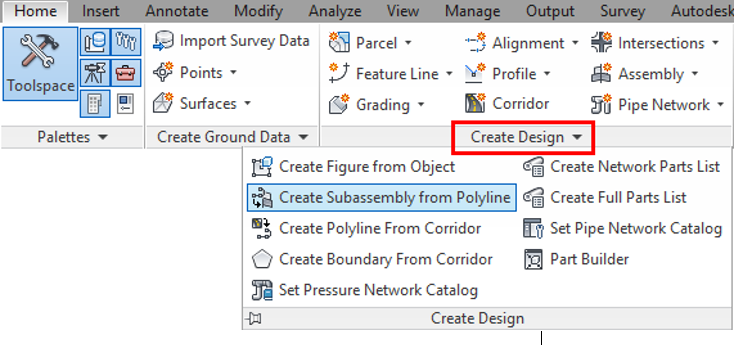
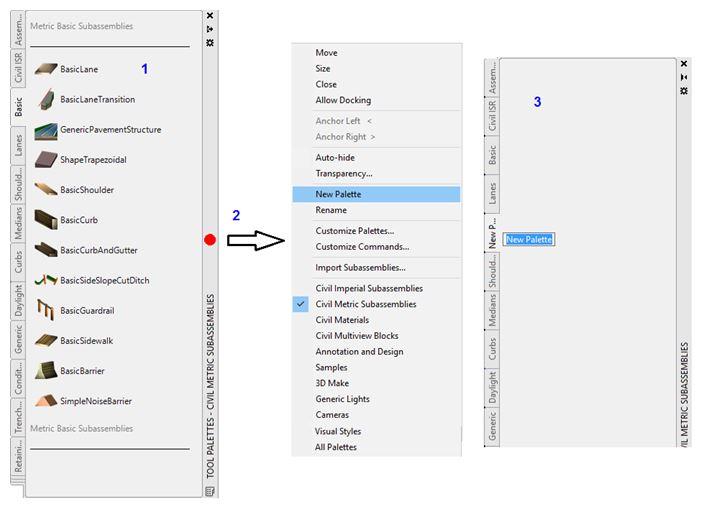
תוכנת Civil 3D מאפשרת ליצור Subassembly מ Polyline סגור. ניתן להגדיר קודים לקווים (Link), נקודות (Points) ותצורה (Shape).
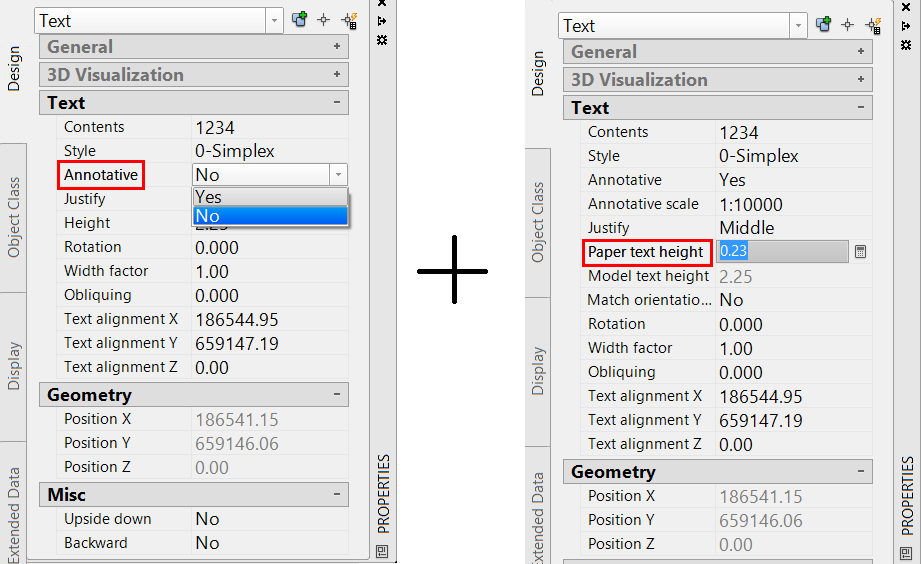
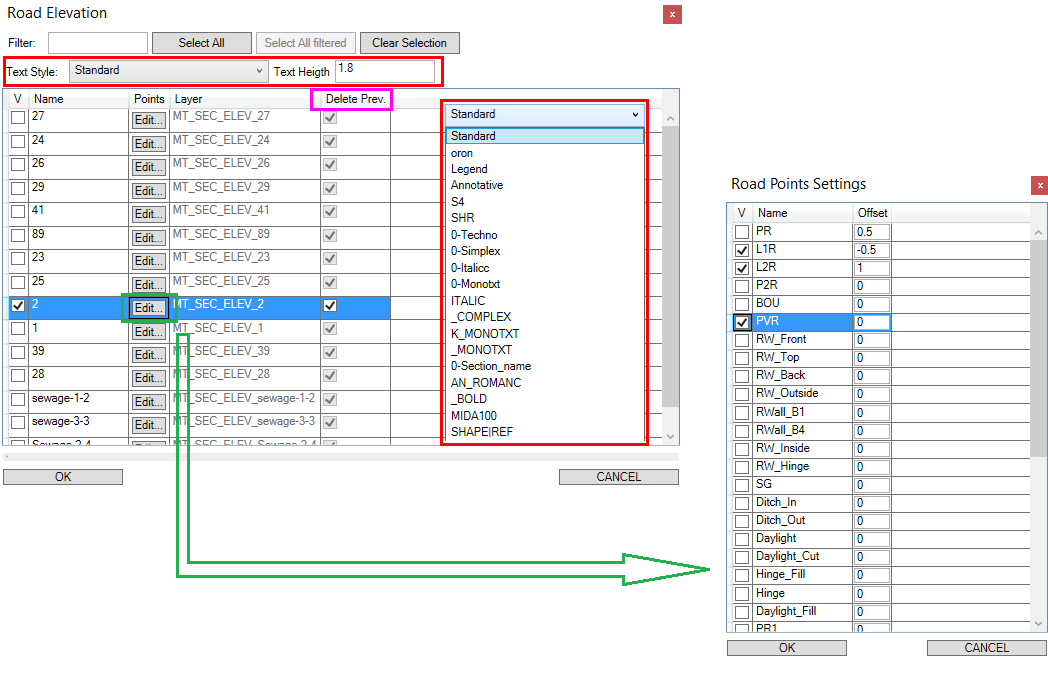
היכנסו לטיפ ע"מ ללמוד כיצד להגדיר טקסט כ-Annotative, המאפשר שינוי גובה הטקסט בהתאם לקנה מידה של השרטוט
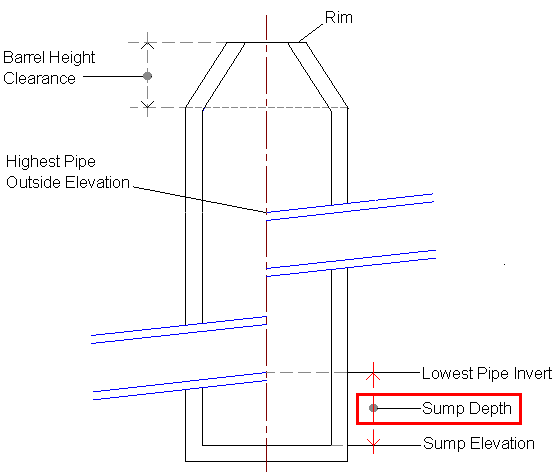
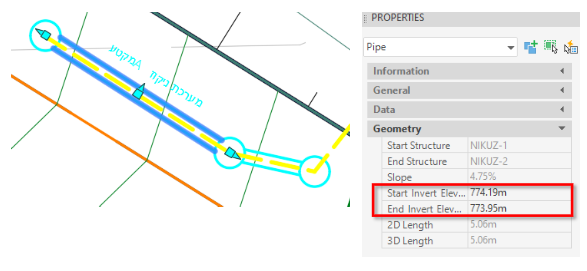
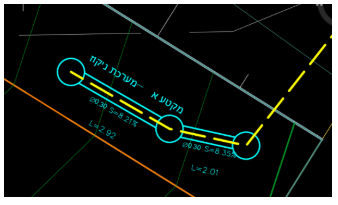
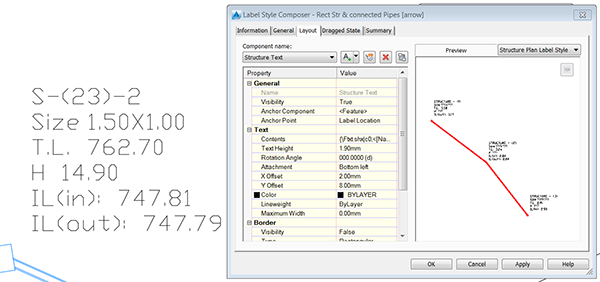
כאשר משרטטים שוחה (Structure) יש לתת את הדעת לגובה העוקה - SUMP
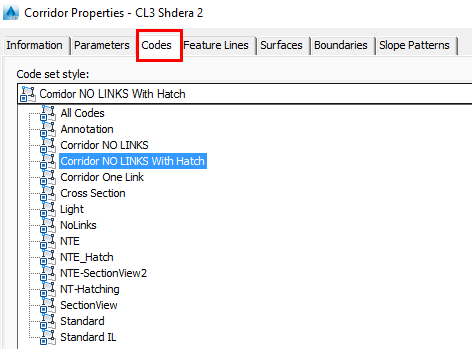
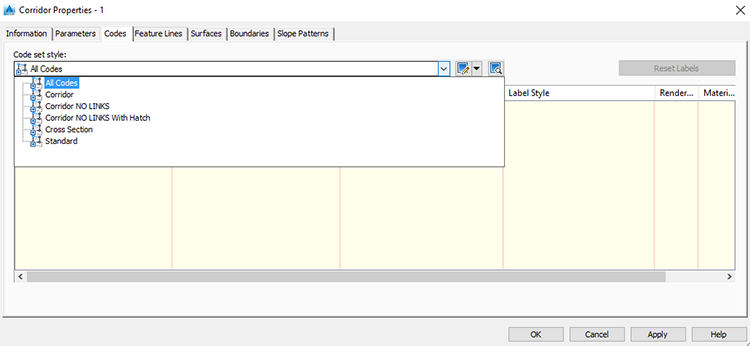
היכנסו לטיפ המומחה של איתן בר לוי על פקודת Corridor Properties
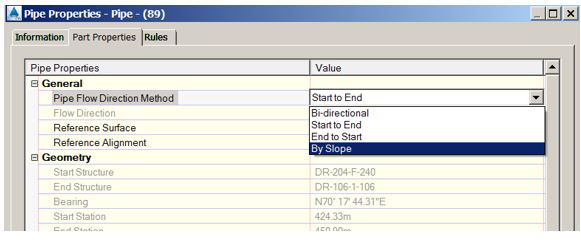
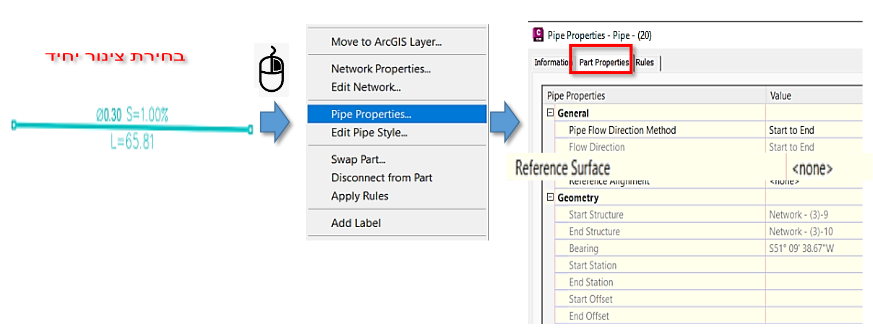
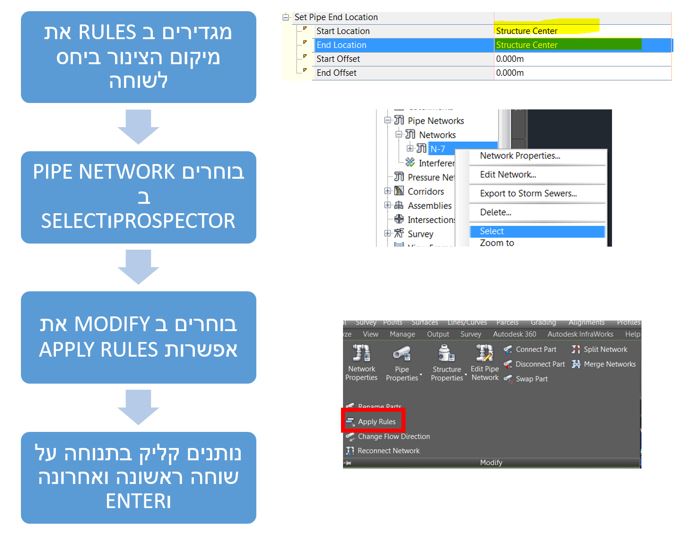
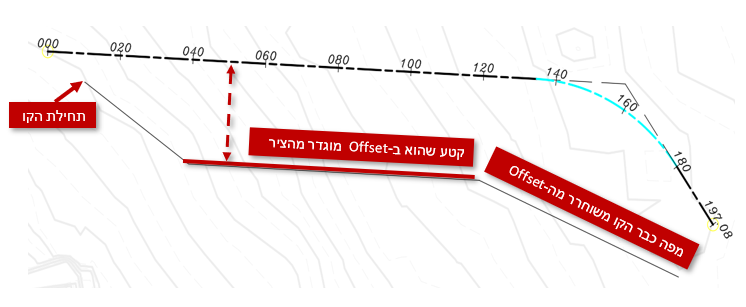
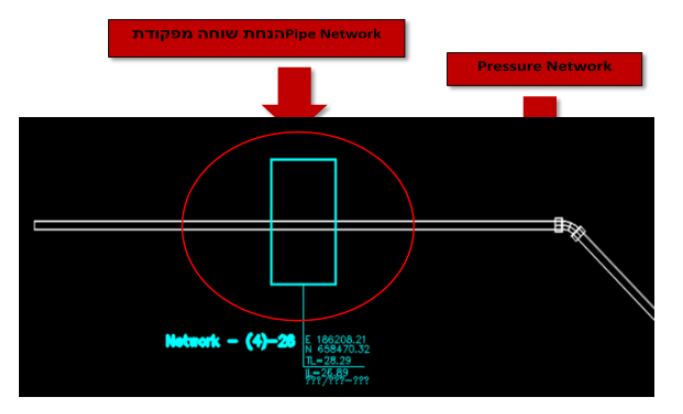
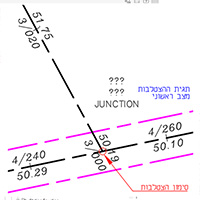
כיוון זרימה בצנרת נקבע כברירת מחדל כ- Start to End, היכנסו לטיפ כדי ללמוד כיצד להתגבר על ברירת המחדל הזו
היכנסו ללמוד על אפשרות נוספת לשרטוט קווי הצנרת בטיפ המומחה של איתן בר לוי
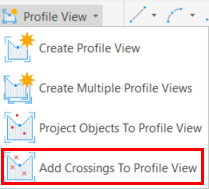
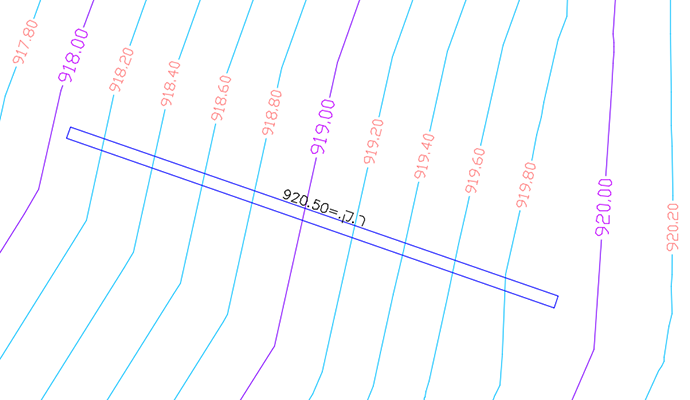
בואו ללמוד על פקודת Add Crossing to Profile view בטיפ המומחה של איתן בר לוי
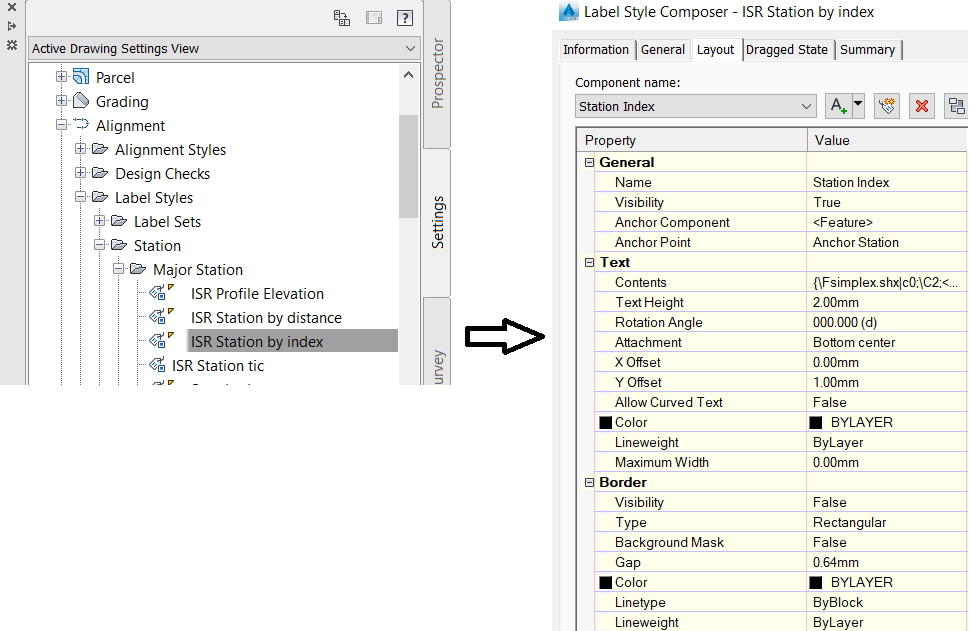
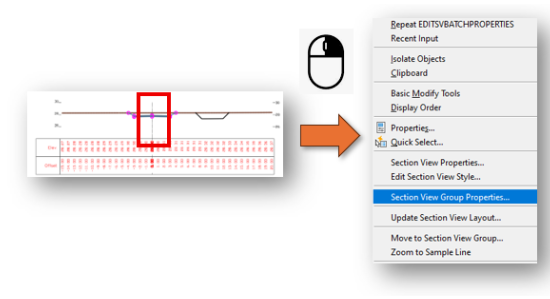
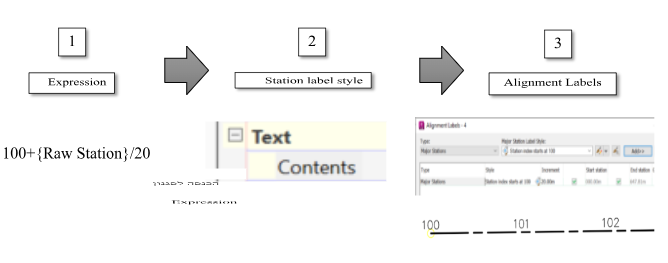
למשתמש הרוצה למספר את התחנות לאורך ציר במספרים עוקבים במקום מרחק רץ, ישנן שתי אפשרויות למספור. היכנסו לקרוא
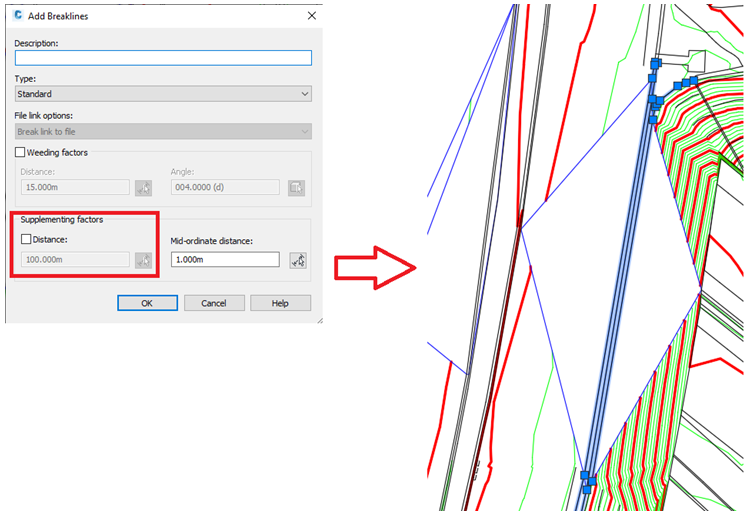
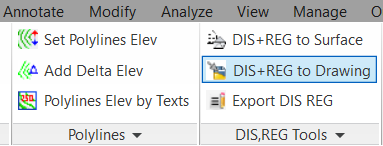
הפקודה יודעת לשלב בין קבצי REG נקודות מדידה "רגילות" וקווי אי רציפות DIS, וליצור משטח - Surface
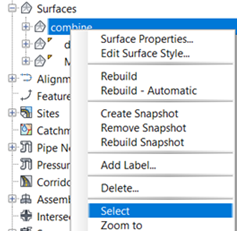
בואו ללמוד כיצד ניתן ליצור משטח אחד משולב בטיפ המומחה של איתן בר לוי
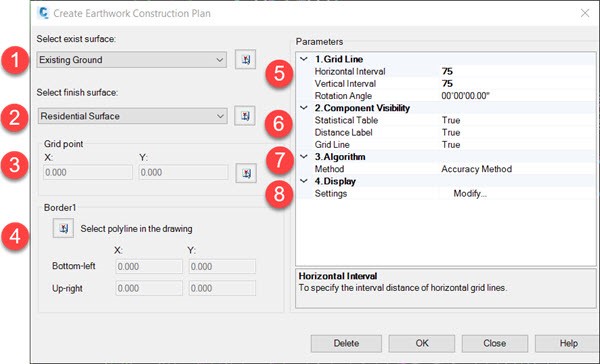
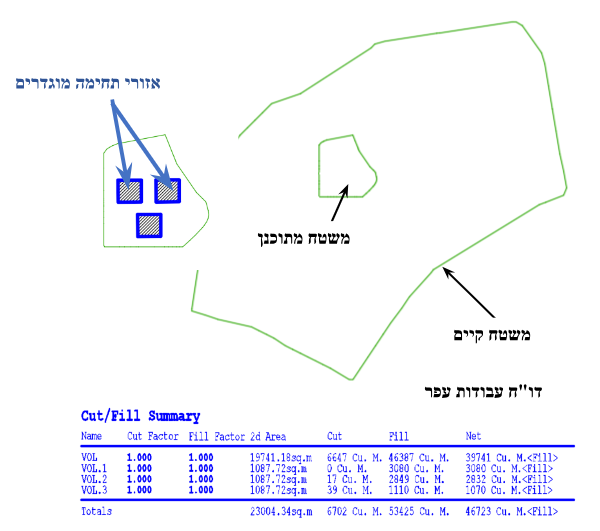
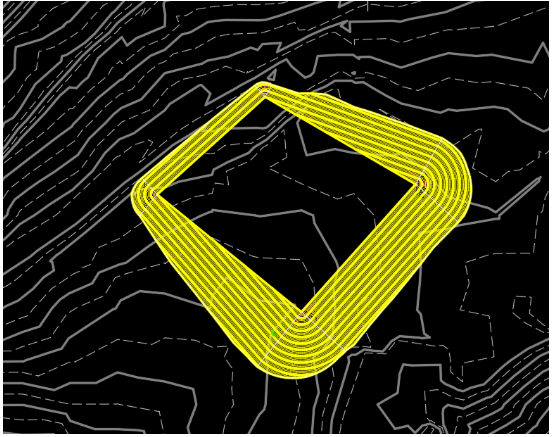
אם תצטרכו ליצור תכנית בנייה לעבודות עפר, הכלי Earthwork Construction Plan ב-AutoCAD Civil 3D הוא מוצר נהדר ששווה להכיר אותו.
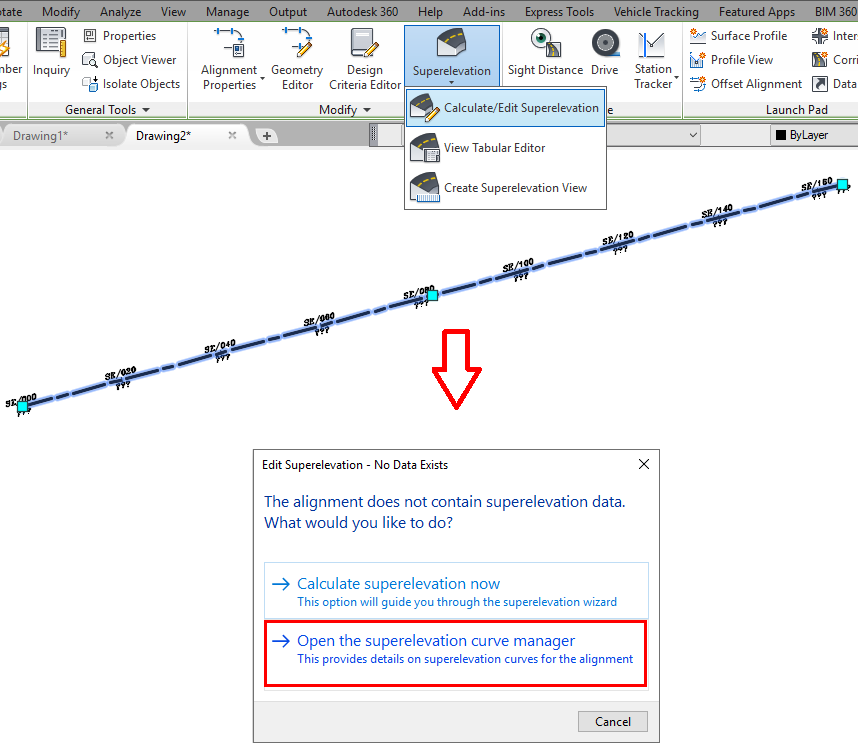
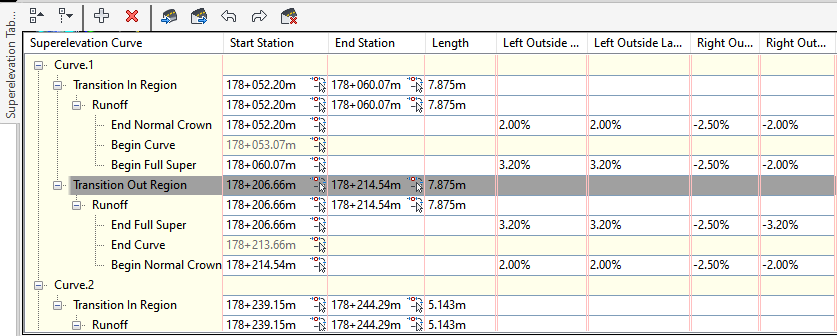
בואו ללמוד על מעבר שיפועים לציר ללא קשתות בטיפ המומחה של איתן בר לוי
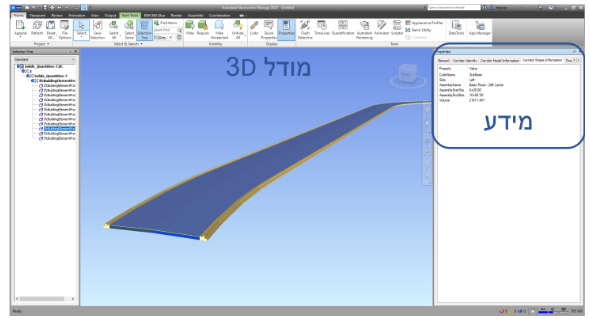
המומחה יניב סטולר בטיפ נוסף למשתמשי Civil3D על פורמט IFC וכיצד לייצא תכנון כביש Corridor ל-IFC. בואו ללמוד
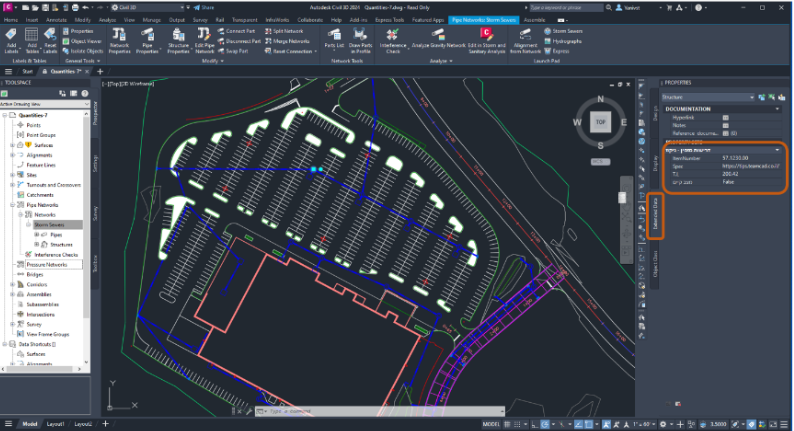
המומחה יניב סטולר בטיפ נוסף למשתמשי Civil3D על ניהול מידע יעיל ומהיר, בהוספת פרמטרים לאובייקטים במודל. בואו ללמוד
המומחה יניב סטולר בטיפ למשתמשי Civil3D על ניהול מידע יעיל, צפייה במידע בקלות, עריכה וייצוא לאקסל
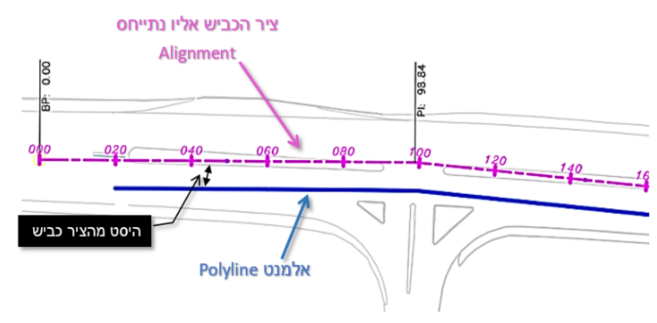
הוספת תגיות לציר, לציון גבהי נקודות מחתך לאורך
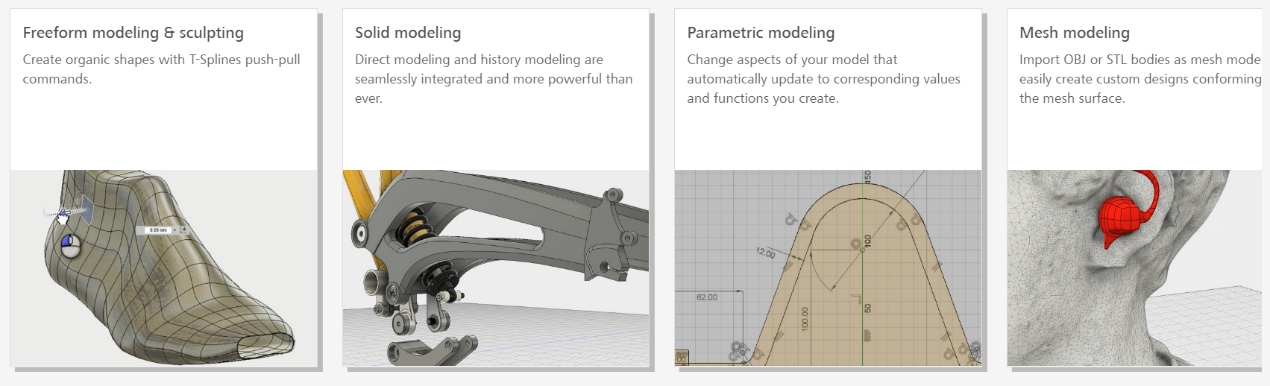
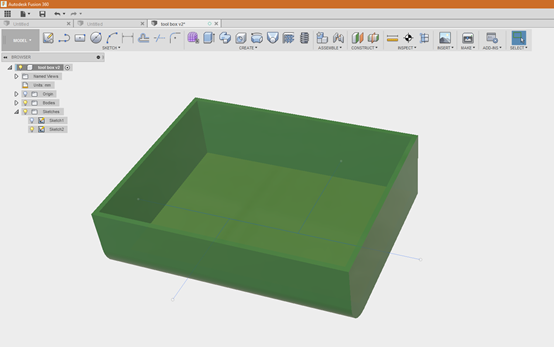
דבי רוח משיח על קורס Fusion 360, בואו להכיר את פלטפורמת הענן המתקדמת, המאחדת את כל שלבי פיתוח המוצר במקום אחד
המומחה אלעד מוסקוביץ' על שיתוף משתמשים ב-Fusion 360 עם כל השלבים לניהול Hub והרשאות לשיתוף חלק ובקרה מתאימה
המומחה אלעד מוסקוביץ' על פקודת Selection Set המסייעת בייעול תכנון ההרכבות באמצעות שמירת קבוצות חלקים וניהולן בלחיצה אחת
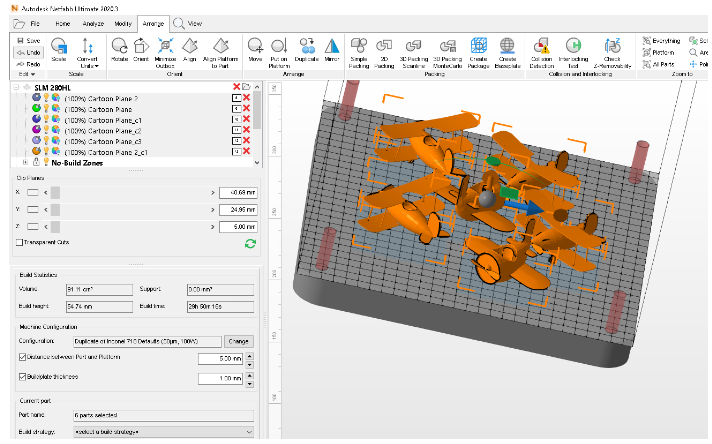
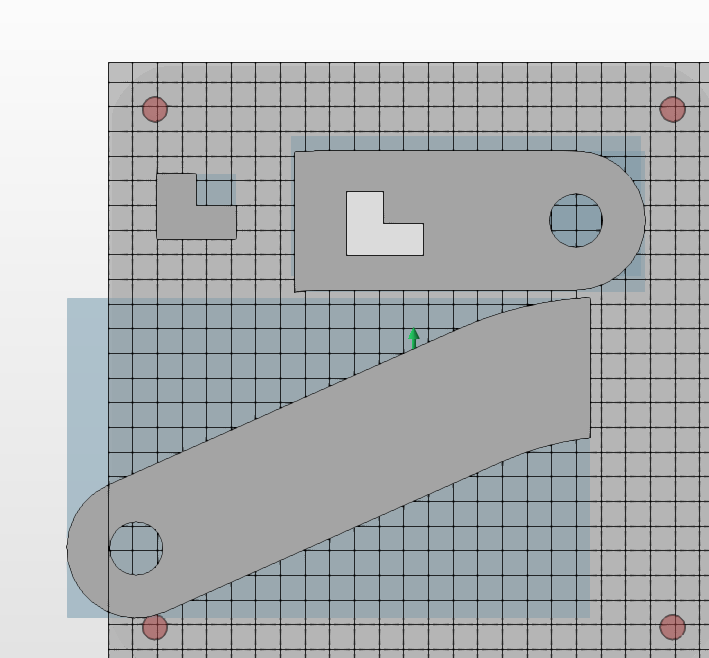
המומחה אלעד מוסקוביץ' על פקודת Arrange ב־Fusion 360 המסייעת לכם לשלב את תכנון החלק עם שלב הייצור בקלות וביעילות
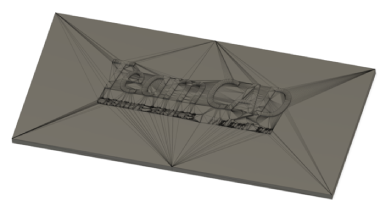
המומחה אלעד מוסקוביץ' עם החידוש ב־Fusion 360: פקודת Texture Extrude המאפשרת לבצע Extrude ישירות מתמונה לחלקי Mesh.
הכירו את פקודת Joints הייעודית להרכבות, בואו לקרוא על הדרך היעילה להגדרת תנועה, דרגת חופש ומיקום בטיפ המומחה של אלעד מוסקוביץ'
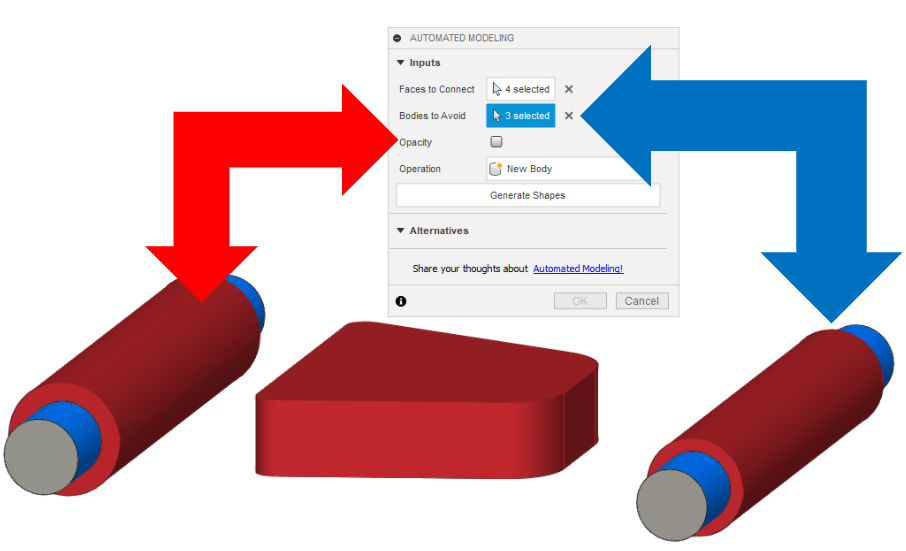
הכירו את פקודת ה-Automated Modeling לתכנון חכם, מהיר ויעיל יותר בטיפ של אלעד מוסקוביץ' למשתמשי Fusion 360
המומחה אברהם ליבנת על השדרוג המשמעותי ב-Fusion 360 המאפשר זיהוי ועיבוד אוטומטי לקדחים Multi-Axis בזויות שונות
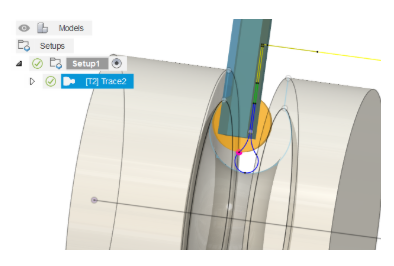
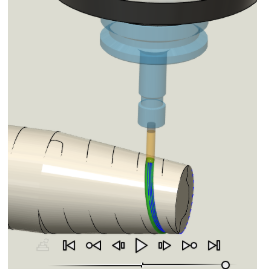
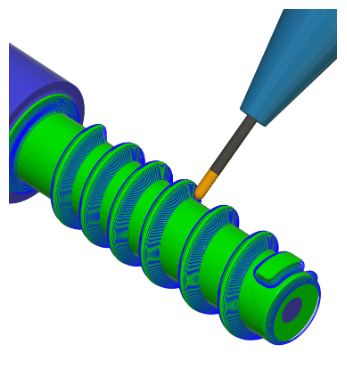
המומחה אברהם ליבנת על ה-Turning Trace במודול ה-Manufacture ב-Fusion 360 המאפשר שליטה מדויקת ומהירה במהלכי חריטה מורכבים
משתמשים ב-Fusion 360 CAM? המומחה אברהם ליבנת על יכולות סימולצית עיבוד לזיהוי בעיות, חסכון בזמן ושיפור האיכות
משתמשי Fusion 360 CAM בואו ללמוד בטיפ המומחה של אברהם ליבנת כיצד להפיק Setup Sheets באופן אוטומטי ובפורמט HTML
בואו ללמוד כיצד לחסוך זמן ולייעל תהליכי תכנות באמצעות הפקודות Copy ו־Derived Operations בטיפ המומחה של אברהם ליבנת
בואו ללמוד בטיפ המומחה של אברהם ליבנת את הטכניקה המאפשרת לעבד שאריות חומר- לחסכון בזמן, הפחתת שחיקה ושיפור האיכות
בואו ללמוד בטיפ המומחה של אברהם ליבנת על מודול הייצור ב-Fusion 360 המאפשר לבצע Nesting לחסכון משמעותי בחומר גלם
היכנסו לטיפ וגלו עוד על מודול הייצור ב-Fusion 360
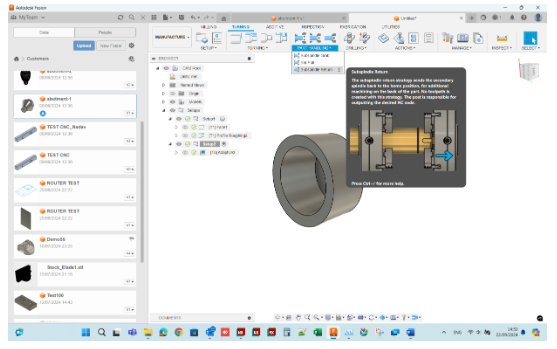
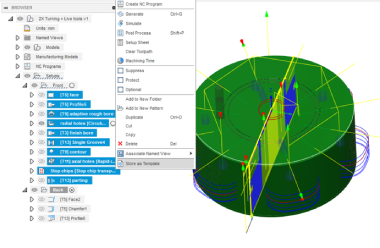
בואו ללמוד בטיפ המומחה של אברהם ליבנת על מודול הייצור ב-Fusion 360 המאפשר לבצע פעולות חריטה משולבות כרסום בקלות
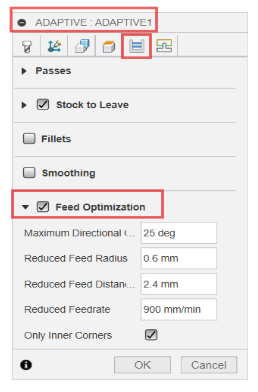
בואו ללמוד בטיפ המומחה של אברהם ליבנת כיצד תוכלו לבצע אופטימיזציה לתנאי השיבוב שתסייע לכם במניעת שחיקת כלי החיתוך
בואו ללמוד בטיפ המומחה של אברהם ליבנת כיצד תוכלו להגדיר ולהשתמש בתבניות עיבוד ולהנות ממגוון יתרונות
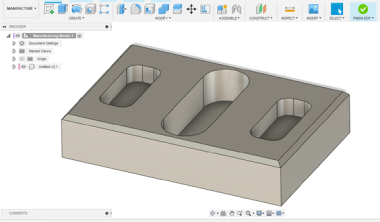
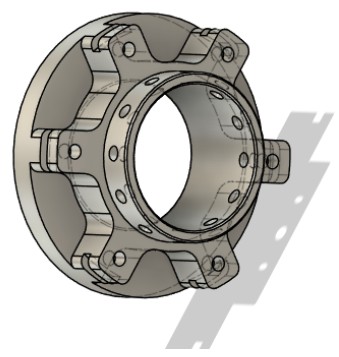
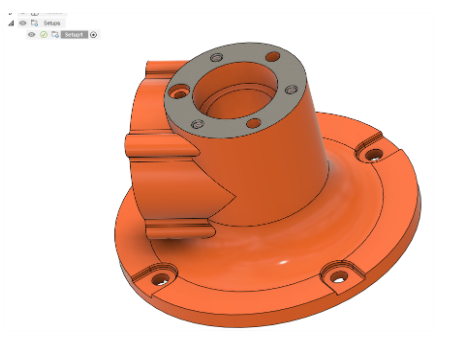
משתמשי Fusion 360, גלו טיפ שימושי לזיהוי נפחי אוטומטי וסילוק עודפי חומר מפי המומחה אברהם לבנת
משתמשי Fusion 360, המומחה אברהם לבנת בטיפ לייעול תהליך ביצוע הקדחים במודול Manufacture
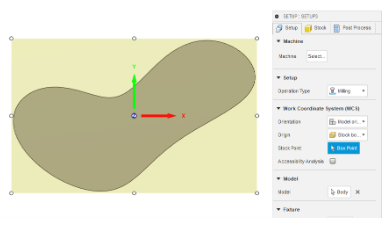
בטיפ המומחה של אברהם לבנת למשתמשי Fusion 360 תוכלו ללמוד על הגדרת "בית" במודול הייצור
משתמשי 360 Fusion, בואו ללמוד כיצד לפתיחת גרסאות ישנות, בטיפ המומחה של אלעד מוסקוביץ'

היכנסו לצפות בסרטון המומחה של דני מרגוליס בנושא Fusion360 Collaboration - הכלי לשיתוף ותיאום פרויקט בענן

היכנסו לצפות בסרטון המומחה של דני מרגוליס בנושא Automated modeling - הכלי החדש שמתכנן ומחולל עבורכם רעיונות באופן אוטומטי
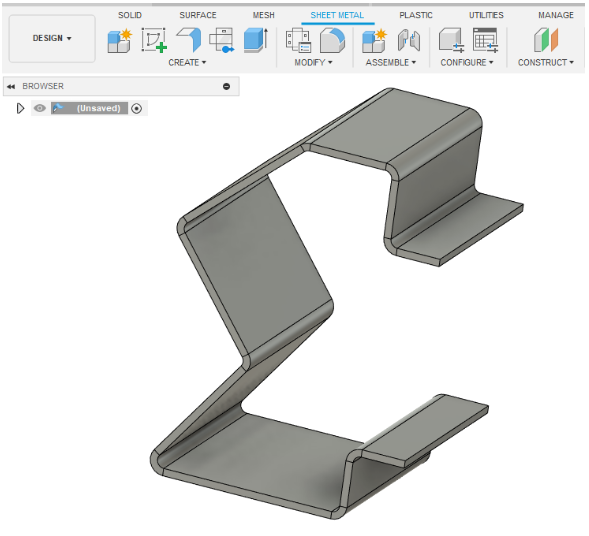
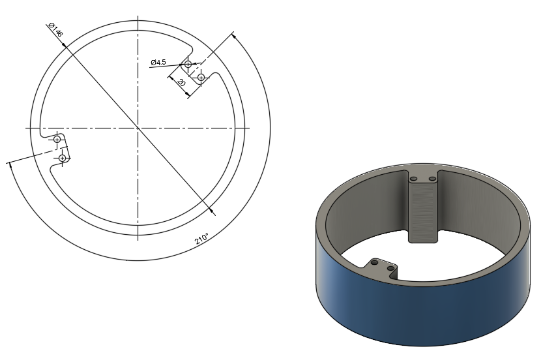
בואו ללמוד כיצד תוכלו ליצור חלקים המיוצרים באמצעות כיפופי פח
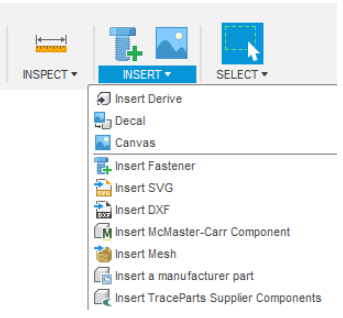
בואו להכיר את הפקודה המאפשרת לייבא למודל ברגים, אומים או דסקיות, בטיפ המומחה של אלעד מוסקוביץ'
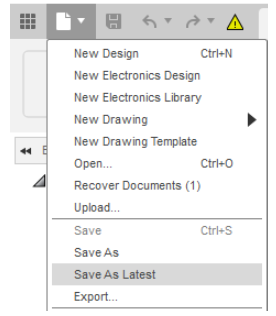
בואו להכיר פקודה מהפכנית שתסייע לכם בשמירת הקבצים באופן תקין, בטיפ המומחה של אלעד מוסקוביץ'
היכנסו לטיפ המומחה של דני מרגוליס ותכירו את קיצור הדרך האולטימטיבי בתוך Fusion360
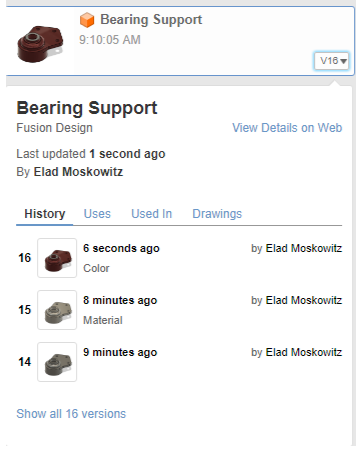
תוכנת Fusion360 מאפשרת לנו בכל זמן נתון לחזור אחורה וורסיה אחת או יותר ו"לקדם" אותה לוורסיה העכשווית על מנת להמשיך את התכנון לכיוון שונה
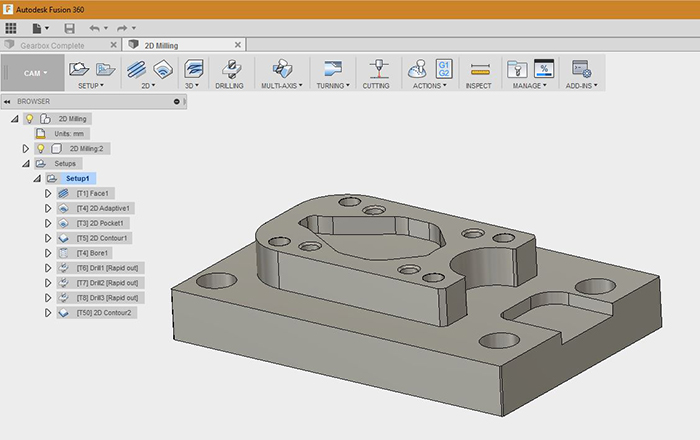
סביבת עבודה נוספת שיש לנו בתוך Fusion360 הינה סביבת הCAM
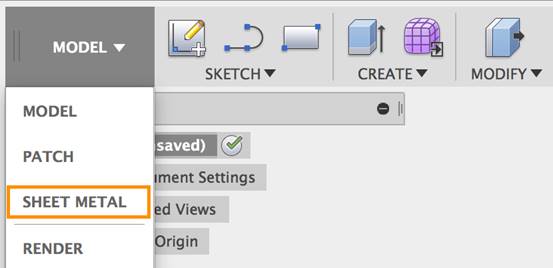
סביבת עבודה נוספת התווספה ליכולות של Fusion360 והיא סביבת Sheet Metal. תוספת זו מקרבת את Fusion360 לפתרון המקיף ביותר בסביבת ענן לתחום המכאני
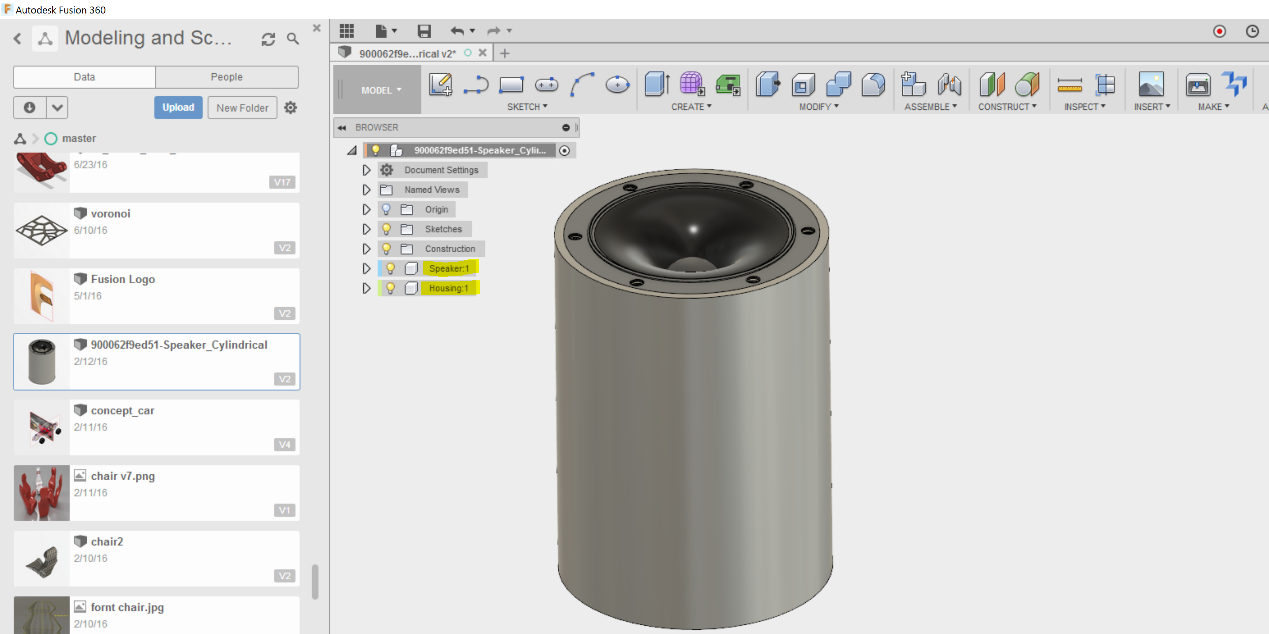
היכנסו לטיפ המומחה של דני מרגוליס ולמדו על עבודה עם חלקים בתוכנת Fusion 360
היכנסו לטיפ המומחה של דני מרגוליס ולמדו כיצד לעבוד עם קבצי stl
היכנסו לטיפ המומחה של דני מרגוליס ולמדו כיצד תוכנת Fusion 360 יכולה לשפר את שיתוף הפעולה בארגונך
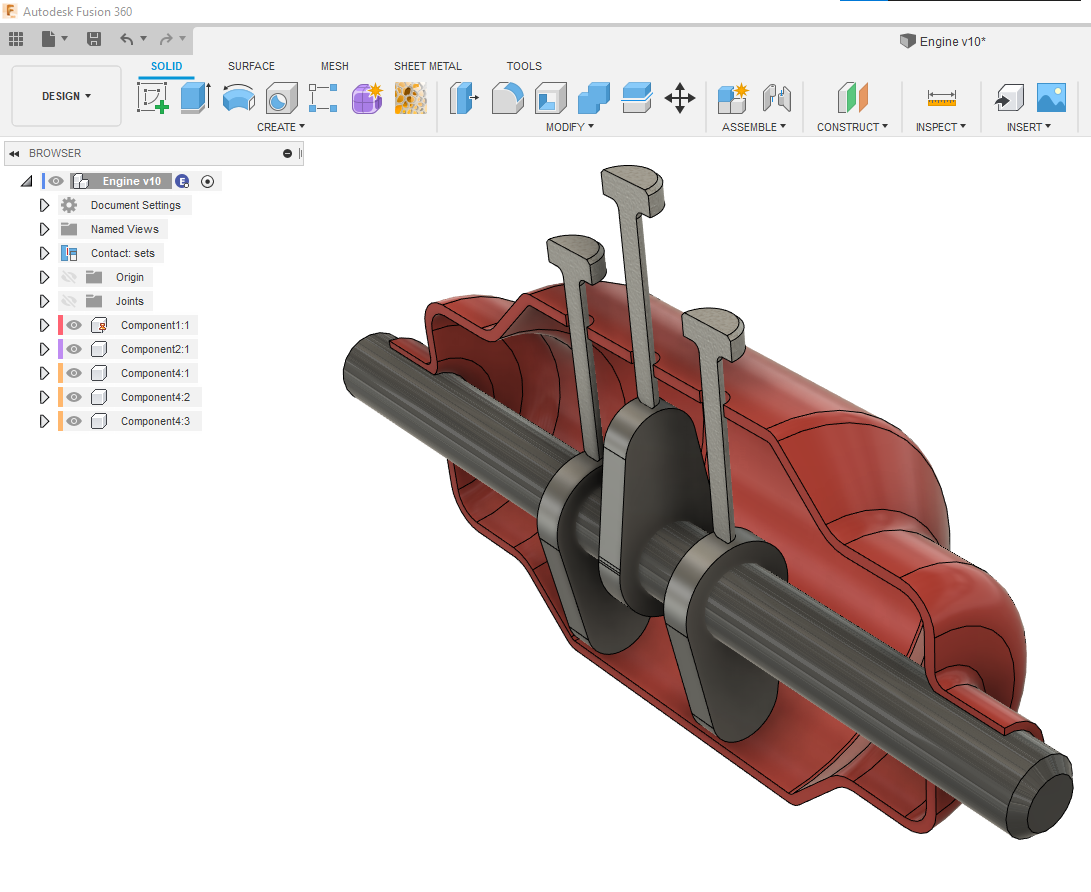
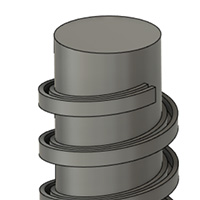
המומחה שלנו, אלעד מוסקוביץ' מפרט כיצד לייצר תנועה של גל ארכובה

משתמשים ב- 360 Fusion? בואו להכיר את מגוון הקונפיגורציות לחלק או הרכבה, בטיפ המומחה של אלעד מוסקוביץ'
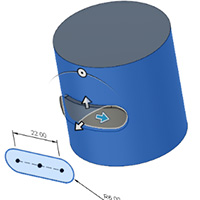
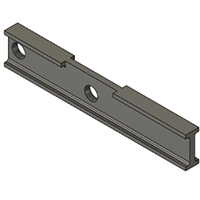
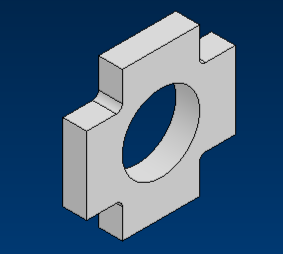
משתמשים ב- 360 Fusion? בואו להכיר מגוון דרכים לבניית חלק מורכב מחלקים פרימיטיביים, בטיפ המומחה של אלעד מוסקוביץ'
המומחה שלנו, אלעד מוסקוביץ' מפרט כיצד תוכלו ליצור ולקבל מידות לזוויות באופן פשוט ויעיל
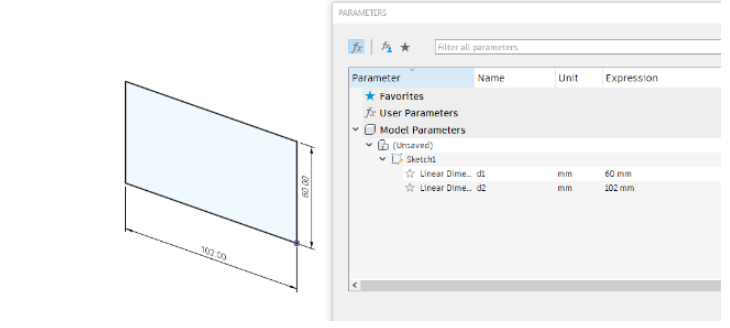
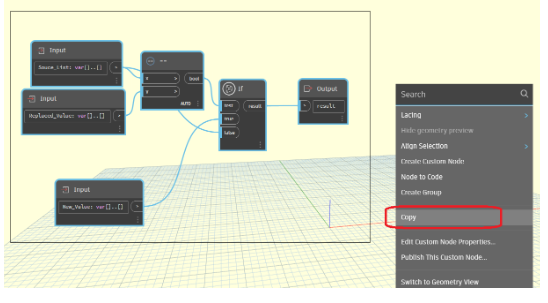
בואו ללמוד כיצד תוכלו ליצור פונקצית If בפרמטר לעבודה יעילה יותר בתוכנה
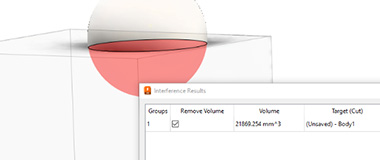
כיצד תוכלו לתכנן מהר יותר בתוכנה ולמנוע היווצרות חפיפה בין גופים
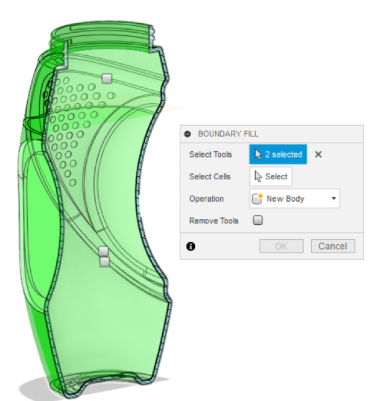
יצירת צורות חלקים מורכבים במס׳ פעולות פשוטות באמצעות פקודת Create From ב- Fusion 360
תוכנת Fusion מכילה מספר סביבות עבודה, הראשית עבור תכנון המודל Design, וסביבות עבודה אחרות

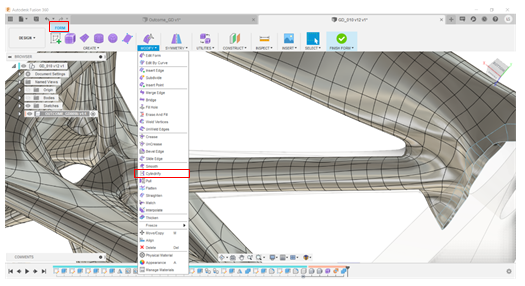
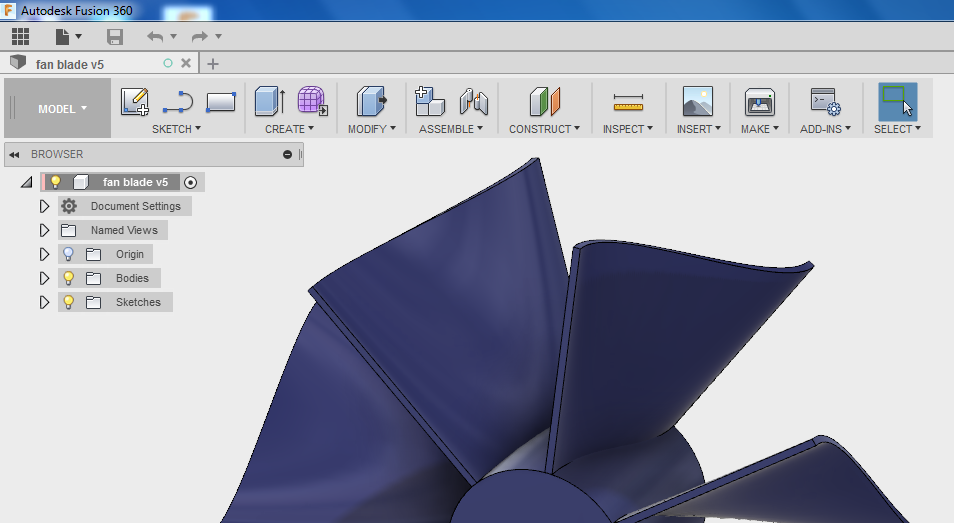
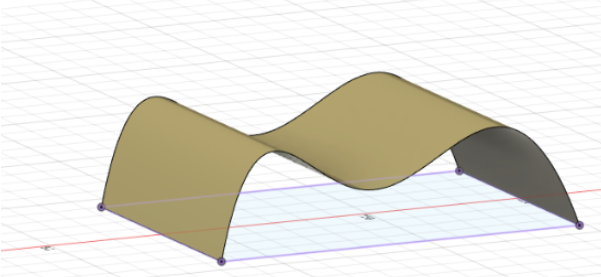
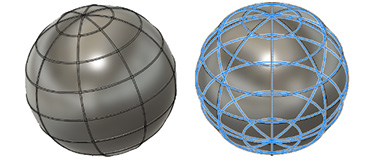
עבודה עם משטחים ויצירת גופי FORM מאפשרת יצירת צורות או חלקים אמורפיים
דבי רוח משיח על קורס Autodesk Infraworks, בואו ללמוד כיצד לקדם תכנון תשתיות חכם ומהיר ולקבל החלטות מושכלת כבר בשלב הראשון
דבי רוח משיח עם פרטים מלאים על הקורס החדש למידול תשתיות תת-קרקע בשיטת BIM, אל תחמיצו, בואו להתעדכן
המומחה יניב סטולר מגלה את סודות ה-BIM! בואו ללמוד כיצד למדל גשר ב-Infraworks ולייצא ל-Civil3D ו-Revit
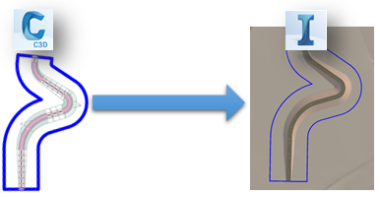
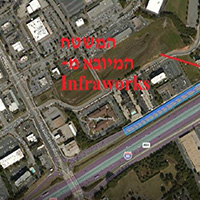
המומחה יניב סטולר בטיפ למשתמשי תכנת Civil3D על ייבוא מודל כביש ל-Infraworks. בואו ללמוד

מדוע כדאי לבצע חישוב עבודות עפר בתוכנת InfraWorks?
בטיפ זה נתמקד בנעשה בתוכנת INFRAWORKS

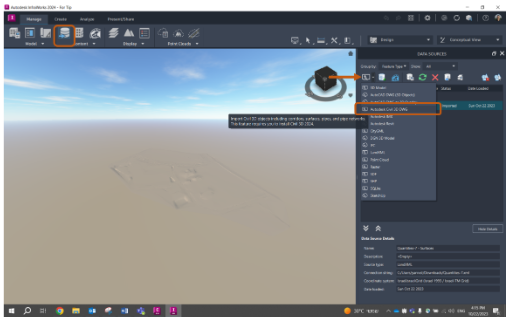
המומחה יניב סטולר בטיפ למשתמשי Infraworks למידול מהיר ויעיל של תשתיות תת קרקעיות בשלבי הפרויקט המוקדמים.

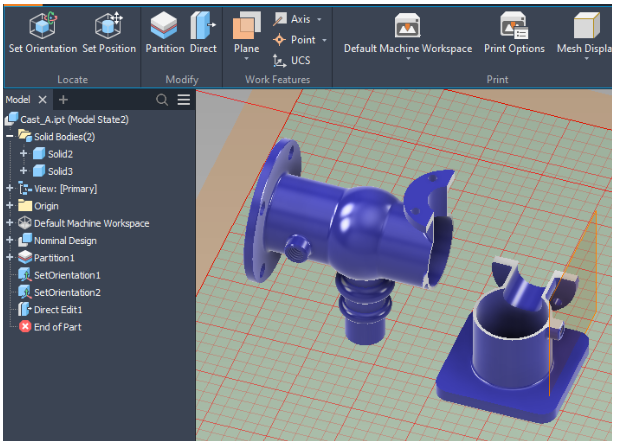
משתמשים ב-Inventor? המומחה של אלעד מוסקוביץ' במדריך מעשי לכיפוף חלקים שאינם מתאימים ל-Sheet Metal באופן מדויק ויעיל
בואו ללמוד על עדכוני Constraint ב-Inventor בטיפ המומחה של אלעד מוסקוביץ':Multiselect ,Suppress ועריכה מהירה ישירות מה-Browser

דבי רוח משיח על קורס Autodesk Inventor, בואו ללמוד על הפלטפורמה האידיאלית לתכנון תלת מימד חכם ומדויק משלב הרעיון ועד לייצור
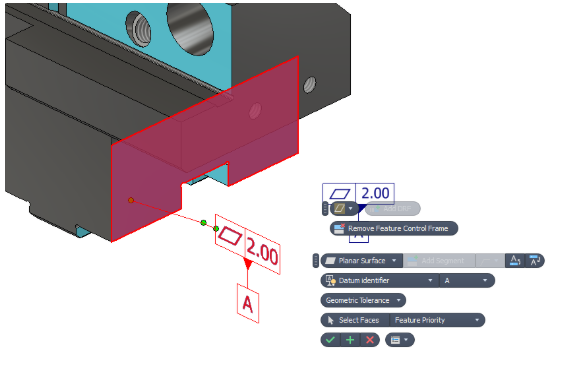
בואו להכיר את יכולות ה-MBD ב-Inventor בטיפ המומחה של אלעד מוסקוביץ': שילוב מידות, טולרנסים, חומרים והערות ישירות במודל
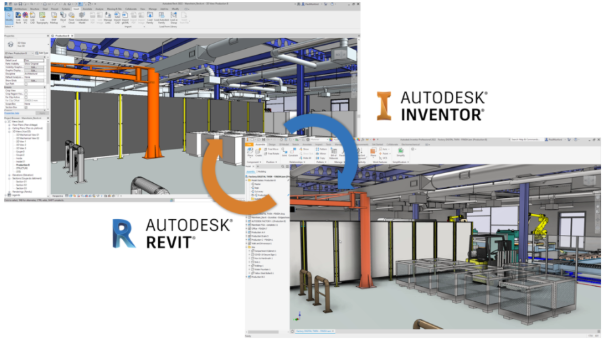
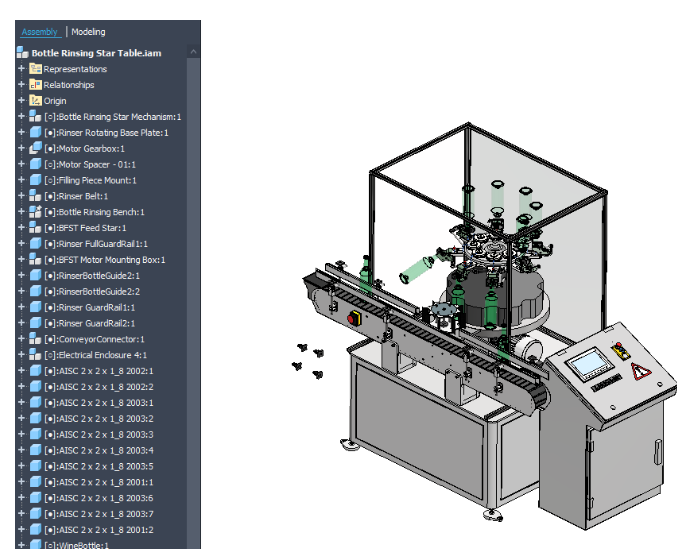
איך משלבים בין עולמות המכונה והבניין? בואו ללמוד בטיפ המומחה של אלעד מוסקוביץ' כיצד לייצא הרכבות מ-Inventor ל-Revit
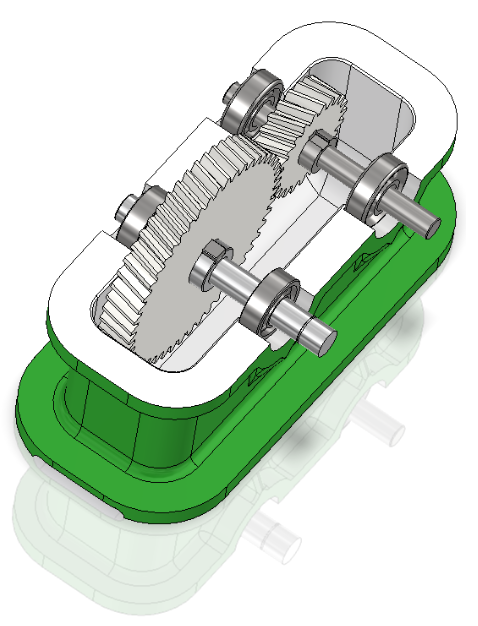
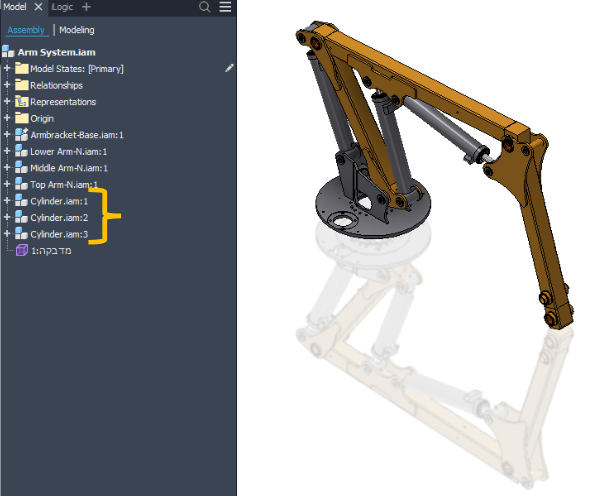
בואו ללמוד בטיפ המומחה של אלעד מוסקוביץ' כיצד ליצור הרכבות מדויקות יותר: תכנון צירים, מיסבים ואטמים בלחיצת כפתור
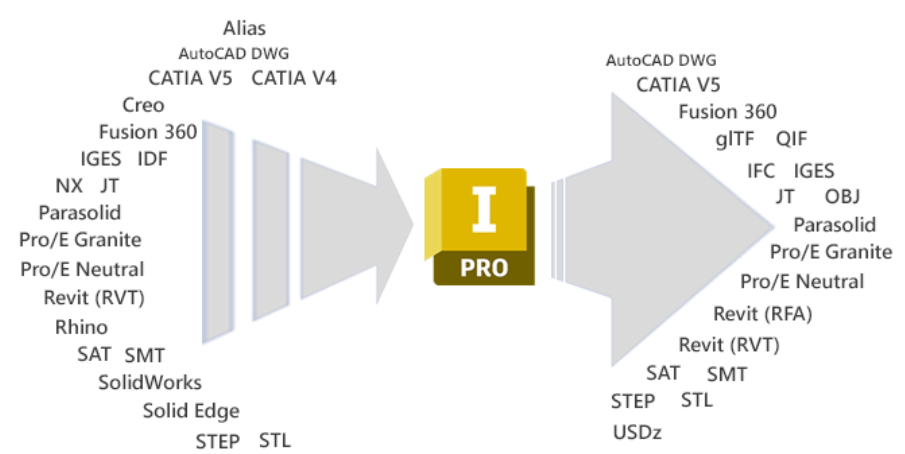
בואו ללמוד בטיפ המומחה של אלעד מוסקוביץ' כיצד תוכלו לייבא בקלות קבצים ממקורות שונים ישירות ל-Inventor
המומחה אלעד מוסקוביץ' על העדכונים האחרונים בגרסה שעודכנה באפריל, בואו להכיר פקודות חדשות ושיפורים בפקודות קיימות
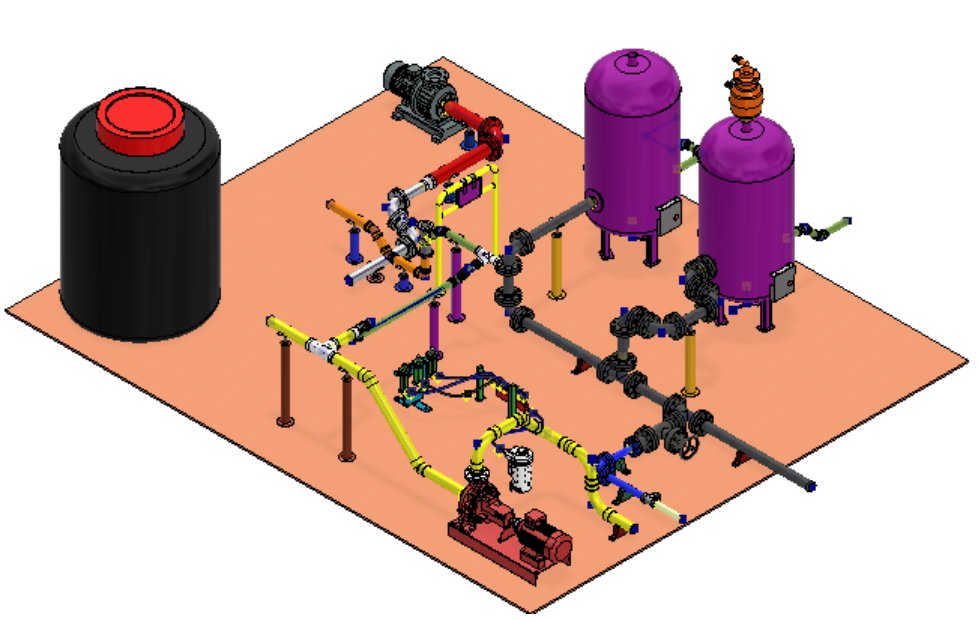
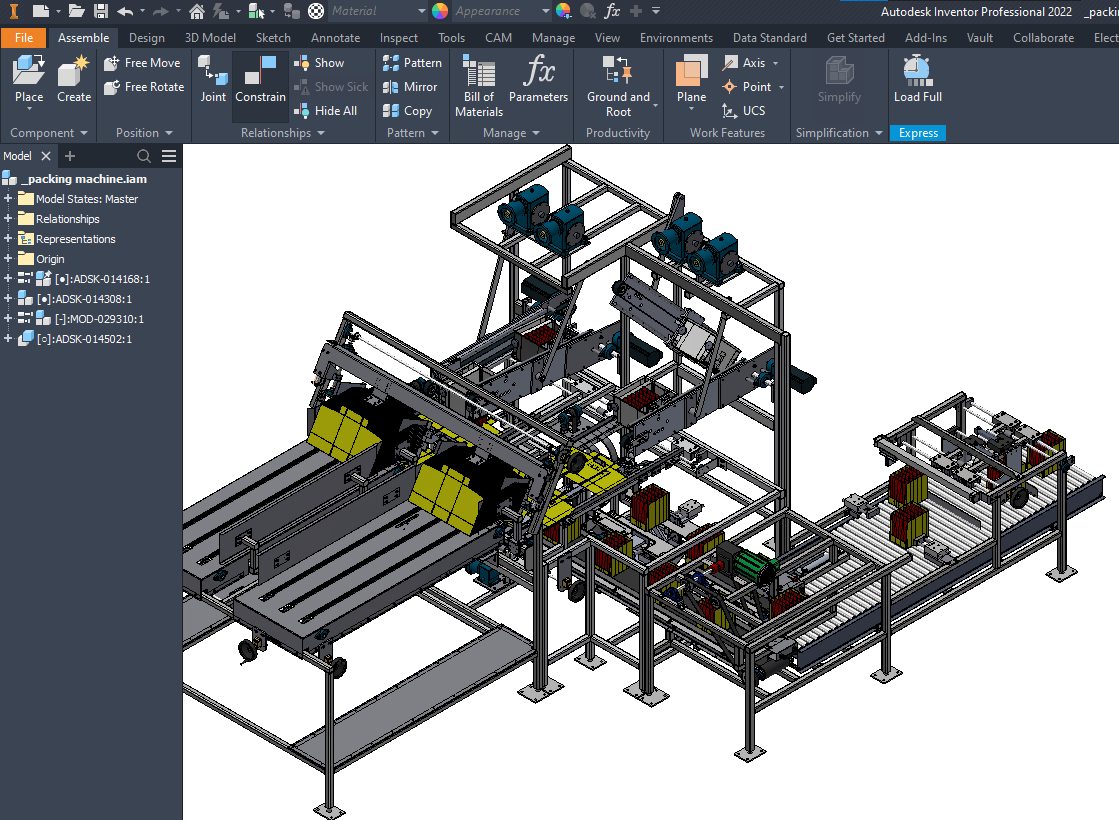
המומחה אלעד מוסקוביץ' על התוסף Factory המאפשר למתכנני קווי ייצור לחסוך זמן יקר באמצעות אוטומציה וניהול נתונים
בואו ללמוד על סביבת העבודה Tube and Pipe לתכנון צנרת אדפטיבי ויעיל יותר
אלעד מוסקוביץ בטיפ מומחה למשתמשי Inventor, בואו ללמוד כיצד ליצור סרטון באמצעות מספר פקודות להדגמת תזוזה בהרכבה
המומחה אלעד מוסקוביץ בטיפ מומחה למשתמשי Inventor, על הגדרת התיקיות בפרויקט באופן שיסייע לכם לעבוד במהירות וביעילות
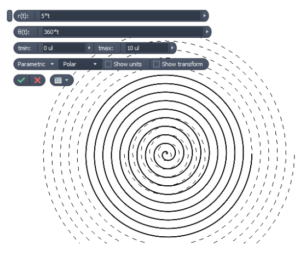
בטיפ של המומחה אלעד מוסקוביץ' תוכלו להבין כיצד להשתמש במשוואה מתמטית לייצור קווים
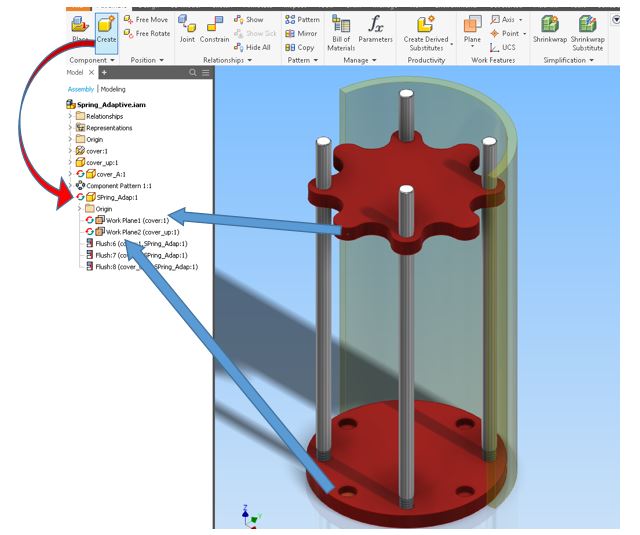
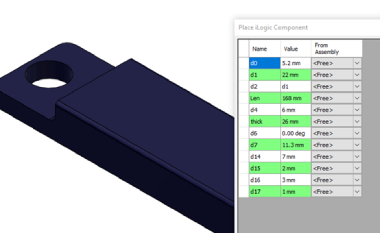
היכנסו לטיפ של המומחה אלעד מוסקוביץ' ותוכלו ללמוד כיצד ניתן לחסוך זמן ביצירת סקיצות עם שימוש בפיצ'ר Place

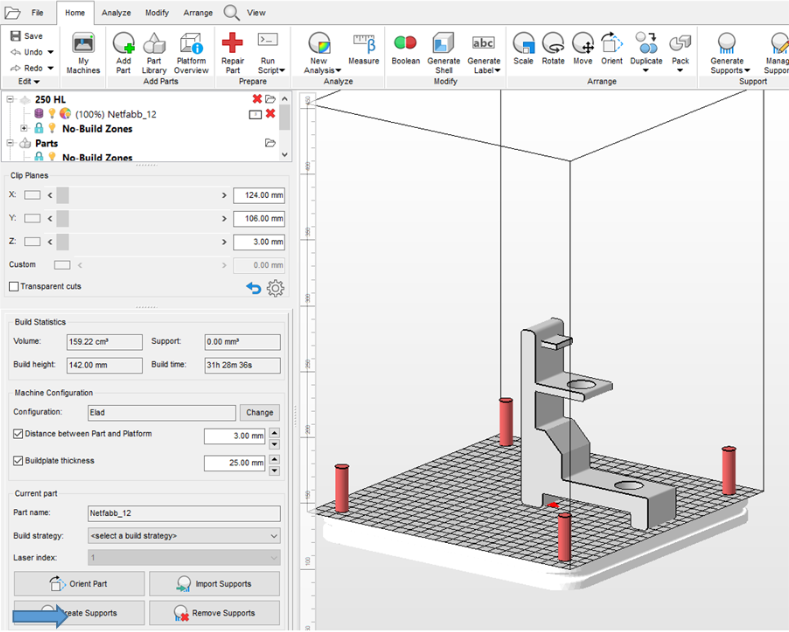
משתמשי netfabb, היכנסו לטיפ המומחה אלעד מוסקוביץ׳ ולמדו כיצד לייצר תמיכות עבור כל חלק.
היכנסו לטיפ המומחה של אלעד מוסקוביץ' למשתמשי Inventor ובואו ללמוד על הפקודה שתחסוך לכם זמן עבודה יקר
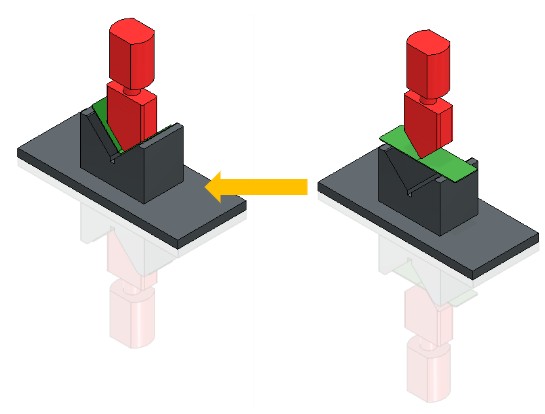
בואו ללמוד על פקודת Move להזזת חלקים בהרכבה ברמת החלק בטיפ המומחה של אלעד מוסקוביץ'
בואו לללמוד כיצד לייצא קבצי CAD באופן אופטימלי בטיפ המומחה של אלעד מוסקוביץ'
היכנסו לטיפ המומחה של אלעד מוסקוביץ' ובואו ללמוד על יצירת גלגל שיניים
היום נלמד כיצד נאחד מספר Segments לאחד, כאשר אנו יוצרים חיווט חשמלי , Cable and Harness, בסביבת ההרכבה

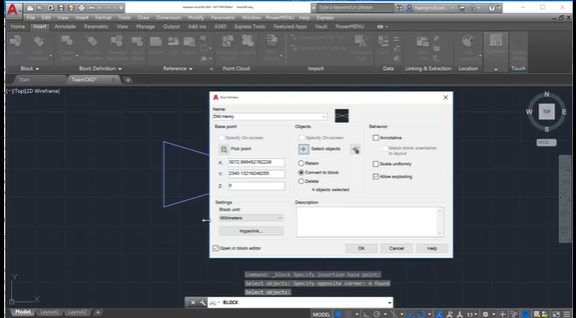
תוכנת Inventor מאפשרת לנו לייצר ברמת סקיצה אובייקט סגור הנקרא בלוק
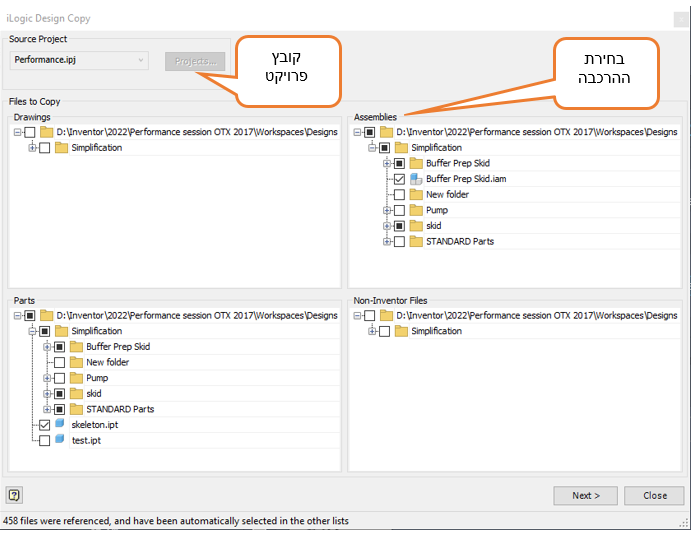
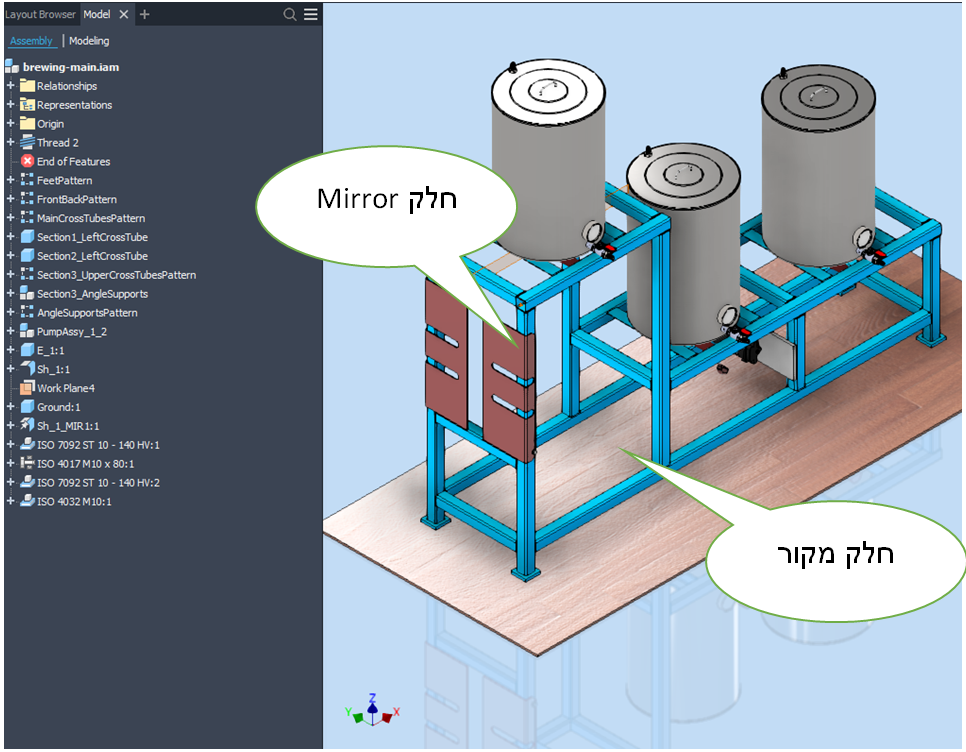
היכנסו לטיפ המומחה של אלעד מוסקוביץ' ובואו ללמוד כיצד לעשות העתקה להרכבה הראשית שלי ולשנות את שמות הקבצים
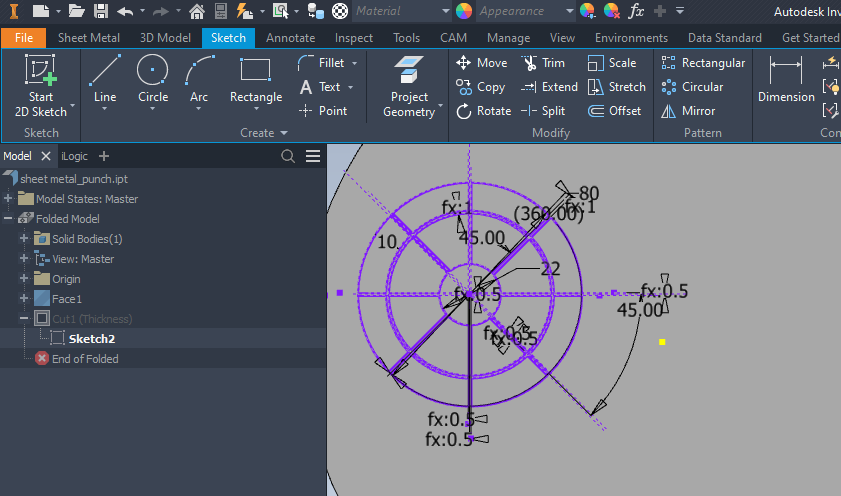
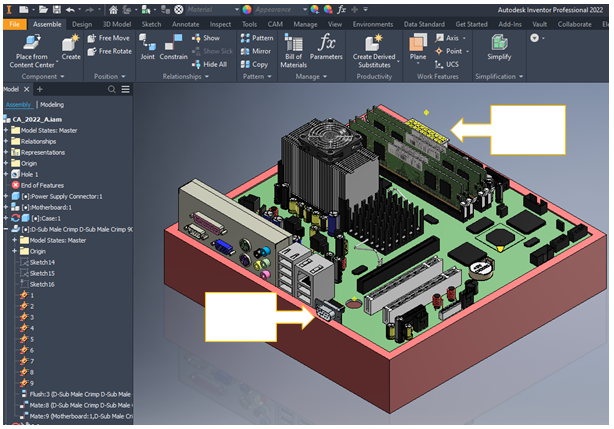
היכנסו לטיפ המומחה של אלעד מוסקוביץ' ובואו ללמוד על פקודת PUNCH TOOL
היכנסו לטיפ המומחה של אלעד מוסקוביץ' למשתמשי Inventor ובואו לללמוד על פקודת Grip Snap
היכנסו לטיפ המומחה של אלעד מוסקוביץ' למשתמשי Inventor ובואו לללמוד על פקודה לדימוי תנועה בהרכבה
היכנסו לטיפ המומחה של אלעד מוסקוביץ' למשתמשי Inventor ובואו לללמוד כיצד למקם באופן אופטימלי את חלקי ההרכבה.
היכנסו לטיפ המומחה של אלעד מוסקוביץ' למשתמשי Inventor ובואו לללמוד כיצד להגדיר פקודות לעבודה יעילה יותר, בלחיצת כפתור.
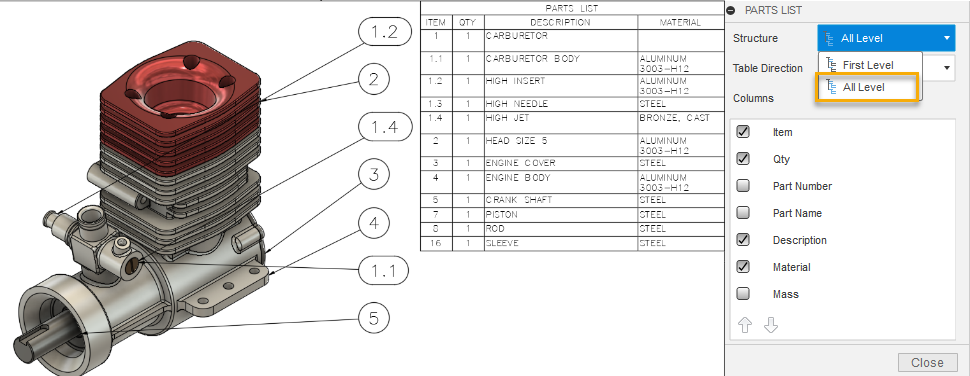
היכנסו לטיפ המומחה של אלעד מוסקוביץ' למשתמשי Inventor ובואו לללמוד כיצד להגדיר כמות בטבלת חלקים לפי אורך
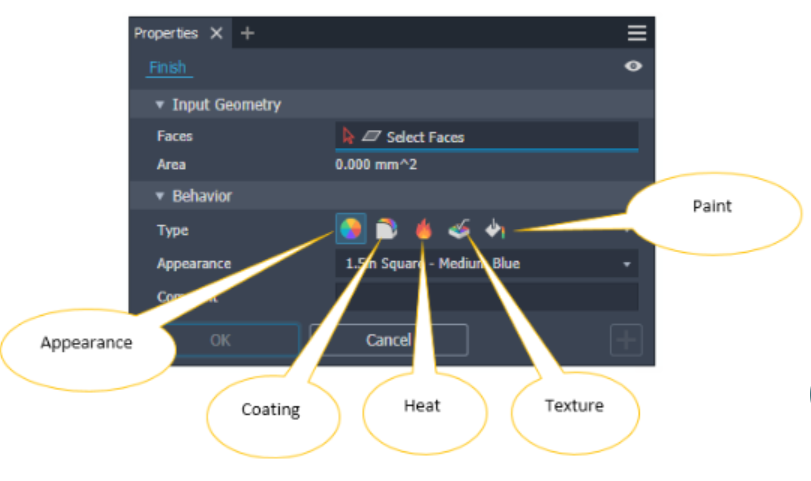
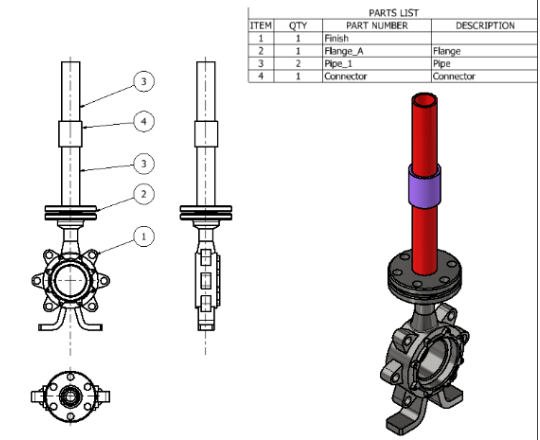
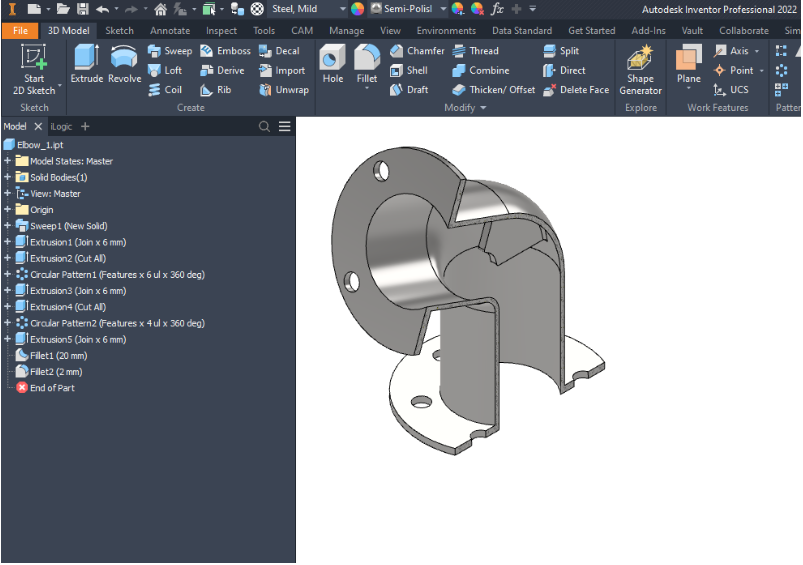
היכנסו לטיפ המומחה של אלעד מוסקוביץ' למשתמשי Inventor ובואו להכיר את פקודת Finish המאפשרת לכם הגדרת צבע חכמה יותר.
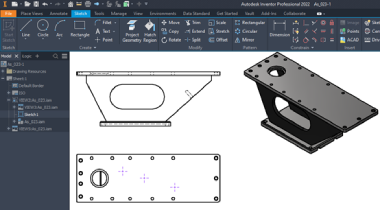
כיצד אפשר לשנות את ה- TEMPLATE של דף שרטוט לאחר שסיימנו להכין אותו?
מתן צבע בתוכנת Inventor היא עניין שבשגרה. ניתן להגדיר צבע בכמה אפשרויות
שינוי תיאור ברירת המחדל של חלק הספרייה לתיאור שמתאים לנו
לדף השרטוט יש שני סוגי Standard אך בשני פורמטים שונים
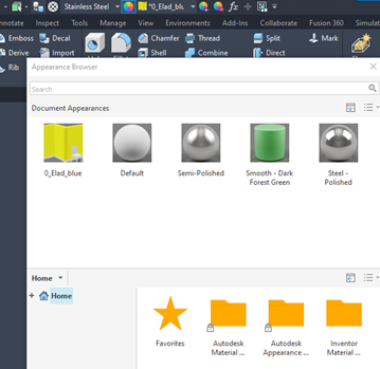
כל צבע שאנו משתמשים בו בחלק משוכפל ונשמר בהגדרת Document appearance
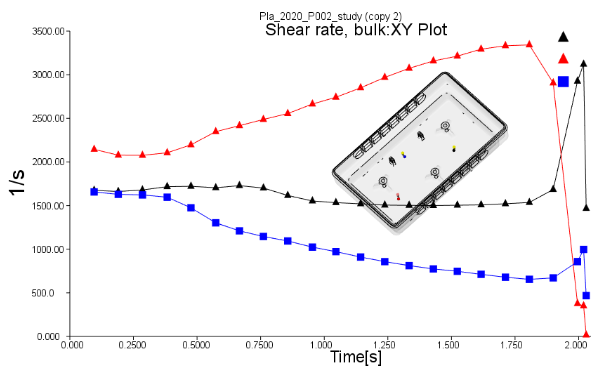
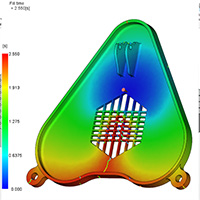
המומחה של אלעד מוסקוביץ' עם מה שאתם צריכים לדעת על תוצאת Shear rate בתוכנת Moldflow
המומחה אלעד מוסקוביץ' עם כל מה שעליכם לדעת על תוכנת Autodesk Moldflow לתכנון וחיזוי מוצרי פלסטיקה. אל תחמיצו
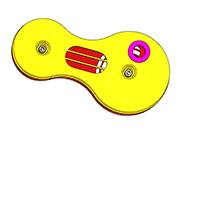
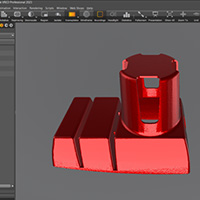
תוכנת Autodesk Moldflow הינה תוכנה המאפשרת חישוב עבור חלקים פלסטיים. ניתן למצוא בעזרתה את מיקום נקודת ההזרקה, זמן מילוי, התכווצות החלק ועוד
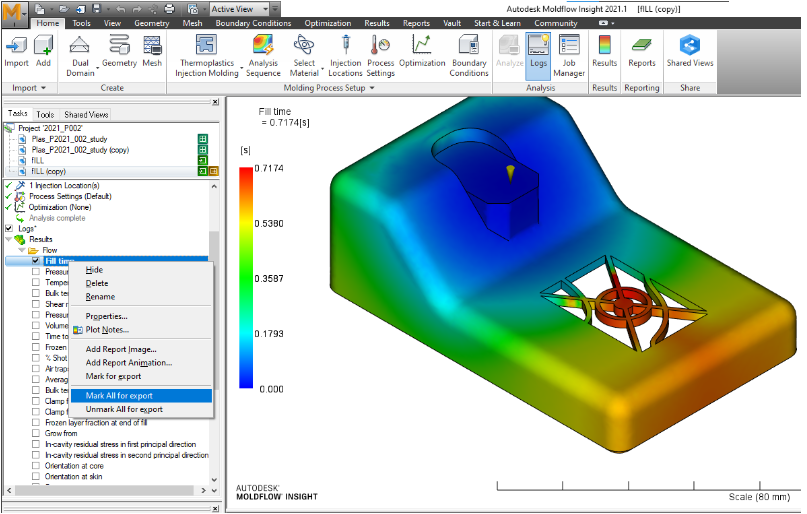
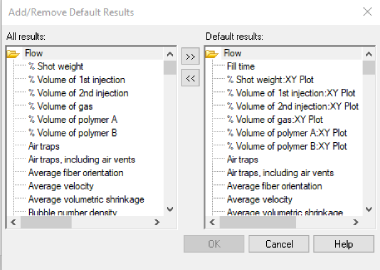
תוכנת Moldflow גם ברמת Adviser וגם Insight, מאפשרת לייצא את התוצאות לתוכנת צפייה אשר כל אחד יכול להוריד למחשבו האישי
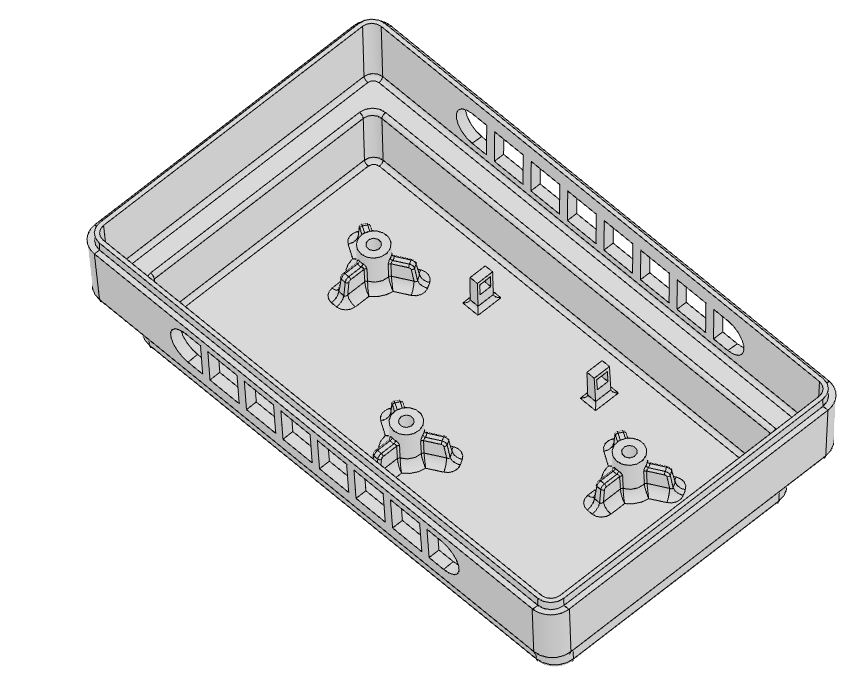
תוכנת Moldflow insight מסוגלת לבצע סימולציה גם על קבצי הרכבה.
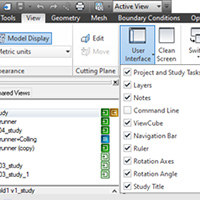
בהרבה מהפרויקטים שאנו עובדים יש מספר לא קטן של Study, בכל אחד אנו יכולים לעשות הגדרות שונות
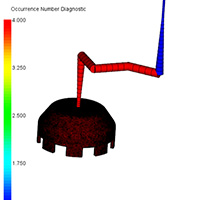
בואו לגלות כיצד ניתן לקצר את זמן האנליזה על ידי שימוש ב-Occurrence number
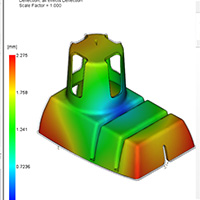
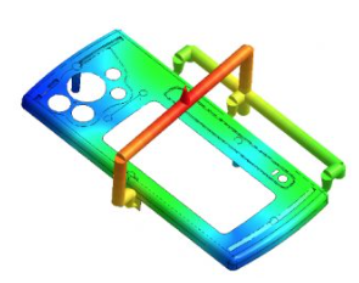
הרצת אנליזה עם Warpage מאפשר לראות את התכווצות ועיוות החלק עקב תהליך ההזרקה.
המומחה סמי גינדיק בטיפ לניהול מידע חכם יותר ב־Navisworks 2026 עם Property Sets לסינון והצגת נתונים מדויקים לכל מודל ודיסציפלינה
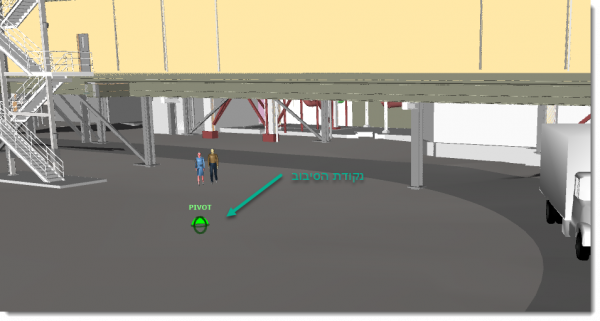
במקרים רבים אנחנו רוצים למדוד מרחק בין שני גופים שמרוחקים מאד. איך נעשה זאת?
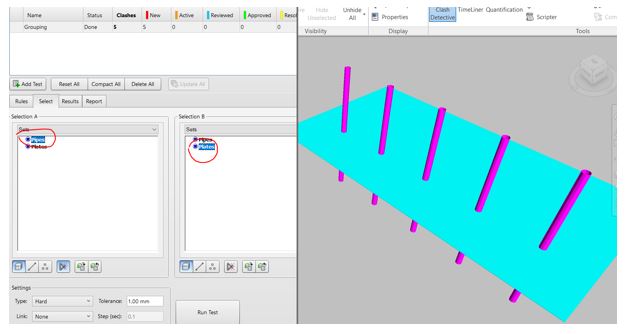
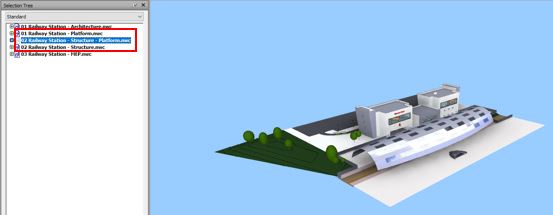
לאחר קבלת תוצאות של בדיקת התנגשות, במקרים רבים יש תוצאות שמבחינתנו זו התנגשות אחת. במקרים אלה נרצה לקבץ את התוצאות. איך עושים זאת?
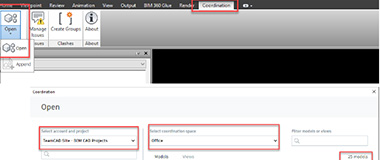
איך לקלוט מודלים ב-Navisworks ישירות מהענן מבלי הצורך בהורדה לדיסק המקומי?

איך מתמודדים עם קובץ NWD סגור שאין לי אפשרות לקרוא מחדש את קבצי המקור בדרכים שונות.
כנסו והכירו כמה טיפים קצרים שייסעו לכם בתהליך העבודה!
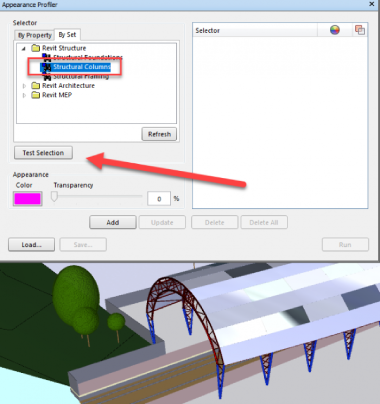
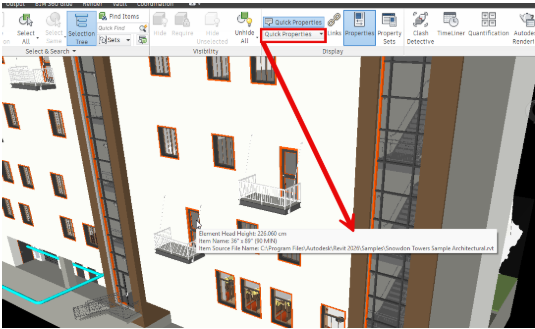
ל-Navisworks כלי ייעודי להתאמת התצוגה של הפריטים על פי ההגדרות שלהם
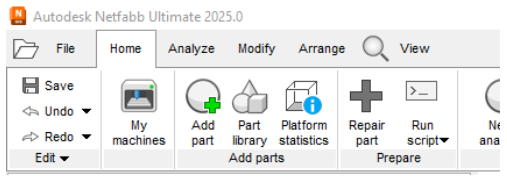
יצירת סביבת עבודה ייחודית בתוכנת Netfabb על ידי הוספת פקודות ב- Ribbon, היכנסו וגלו כיצד
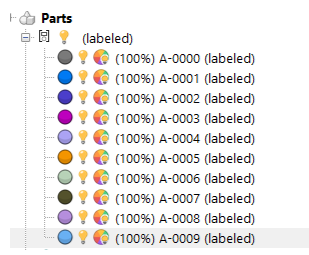
היכנסו לטיפ של המומחה אלעד מוסקוביץ' ותוכלו ללמוד כיצד ניתן לשנות הגדרות, לערוך וליצור שינוי שם לחלק לפי Label.
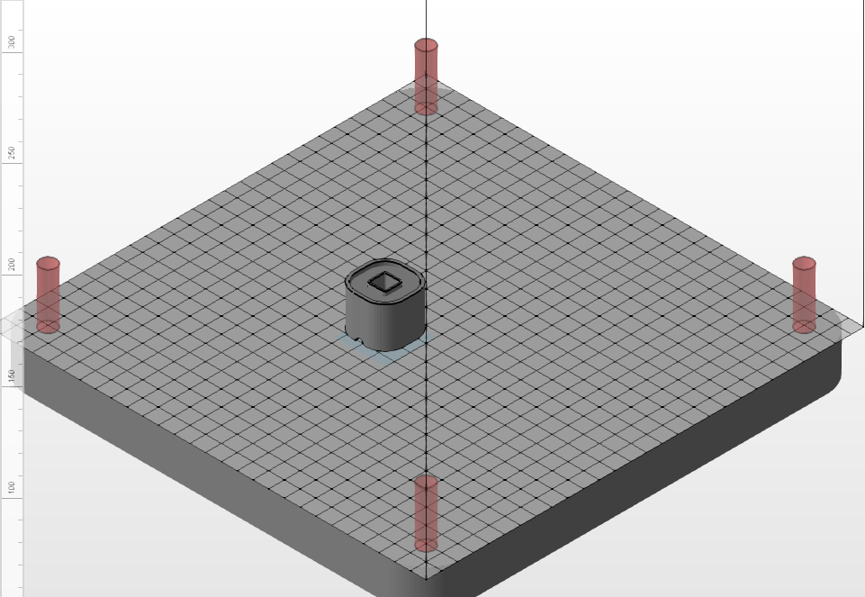
משתמשי netfabb, היכנסו לטיפ המומחה אלעד מוסקוביץ׳ ולמדו כיצד לייצר תמיכות עבור כל חלק.
היום נראה כיצד תוכנת NETFABB תייצר במהרה חלק חדש עם מידות OFFSET ותחסוך לנו מידול מחדש של החלק
תוכנת Netfabb מאפשרת בדיקת התנגשויות בין החלקים השונים לפני יצירת הקובץ להדפסה
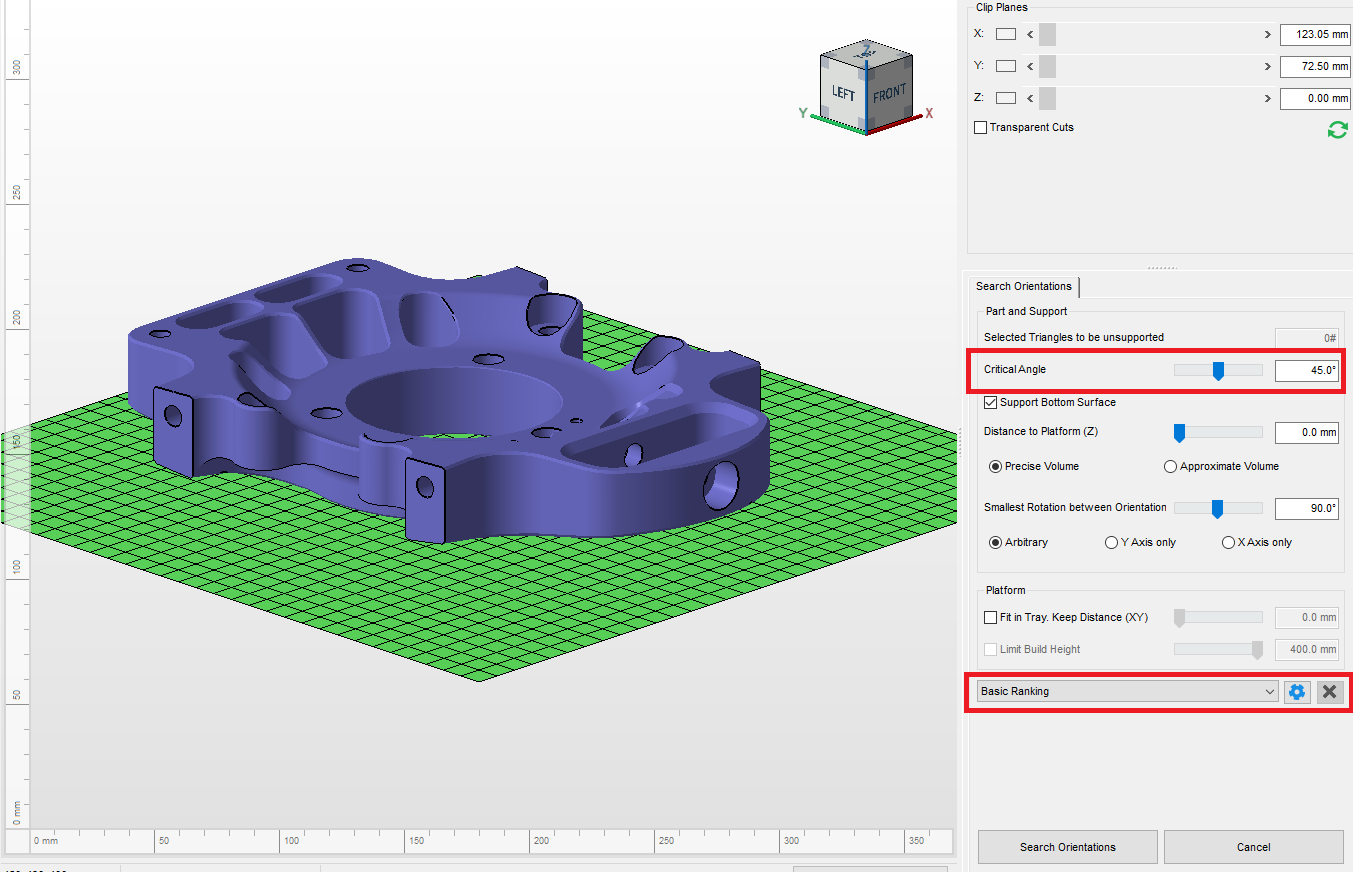
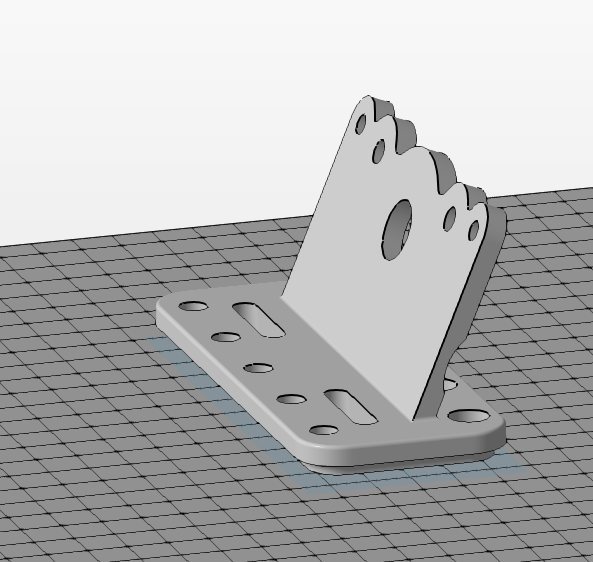
בטיפ היום נדבר על אופטימיזציה של חלק באוריינטציה של הורדת משקל ושמירה על החוזק
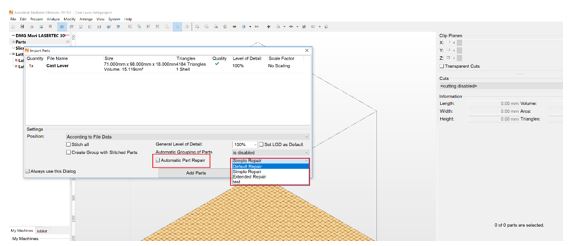
היכנסו לטיפ המומחה של דני מרגוליס ולמדו כיצד מבצעים תיקון לחלק שמיועד להדפסה
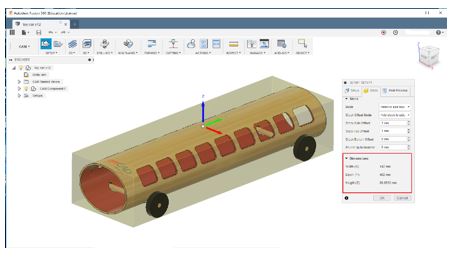
בתוך Netfabb כלים רבים לעריכת מודל והתאמתו להדפסה כשאחד מהן Bounding Box אשר מתקבל באופן אוטומטי בפתיחת חלקים
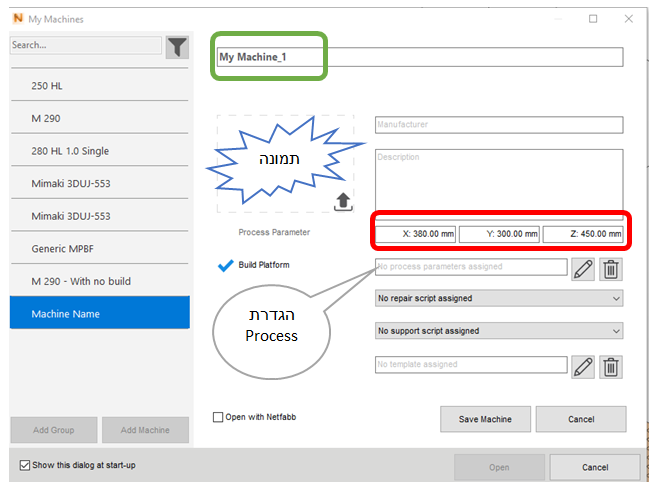
היכנסו לטיפ המומחה של אלעד מוסקוביץ' ובואו ללמוד כיצד ניתן ליצור מדפסת חדשה לפי הדרישות שלנו
בתוכנת NETFABB ניתן לקבל Supports לפי סוג המדפסת, לאחר קבלת התוצאות ניתן לערוך את התוצאה שהתקבלה לפי רצוננו
גרסת 2022 מוסיפה מספר שיפורים ליצירת תמיכות. אחד מהם הוא תמיכות הניתנות לשינוי בעזרת עקומה.

היכנסו לקרוא בטיפ המומחה של אלעד מוסקוסיץ׳ כיצד תוכנת Netfabb מאפשרת לכם הוספת Label בקלות לעבודה יעילה יותר עם המודל
זמן ההדפסה הוא שיקול חשוב, בתוכנת Netfabb ניתן לקבל את משך זמן ההדפסה של החלק.
הורדת כמות תמיכות להדפסה תעזור לנו באיכות הדפסה, זמן, עלות ועוד
עבור קבלת מודל טוב עם מינימום פגמים יש לשים לב ללא מעט פרמטרים.
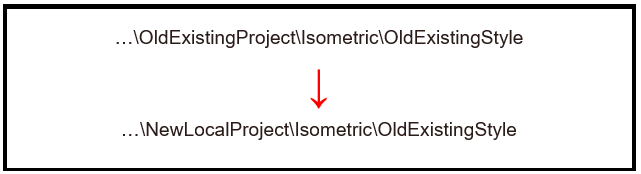
משתמשים ב-AutoCAD Plant 3D? בואו לללמוד בטיפ המומחה של מקס בודובסקי כיצד לייצא P&ID מבלי לאבד את סגנונות הקווים
אל תחמיצו את טיפ המומחה של מקס בודובסקי לבניה ושימוש באביזרי צנרת בהם יש חשיבות לכיוון הזרימה, בואו ללמוד
משתמשי Plant 3D, מהיום ניתן לשתף את הפרויקט היישר אל תיקיה ייעודית. היכנסו לטיפ המומחה של מקס בודובסקי ולמדו כיצד
המומחה מקס בודובסקי על הפקת דוחות עבור פרויקטים שיתופיים בענן אוטודסק ACC למשתמשי Plant 3D
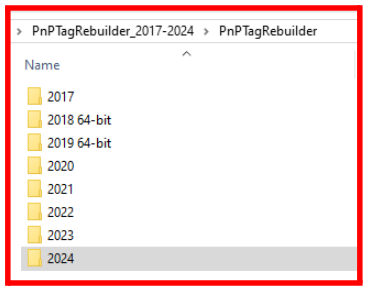
המומחה מקס בודובסקי על עדכון תגים לאחר שינוי פורמט התג ב- Plant 3D, היכנסו להתעדכן
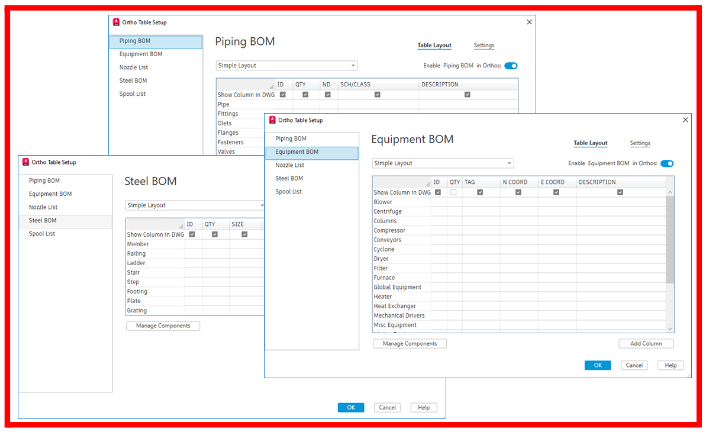
המומחה מקס בודובסקי על האפשרויות המגוונות בגרסת 2024 של Plant 3D, להוספת כתב כמויות לשרטוטי Ortho
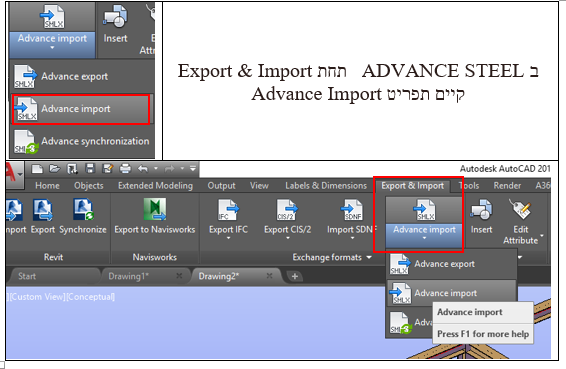
בואו לקרוא על Autodesk Advance Steel - מוצר המשמש מתכנני קונסטרוקציות פלדה

היכנסו לטיפ המומחה של סמי גינדיק ולמדו כיצד נוכל להגיע לתוצאה הרצויה שאנו צריכים

היכנסו לטיפ המומחה של מקס בודובסקי וקראו על המלצותיו להבטחת עבודה רציפה
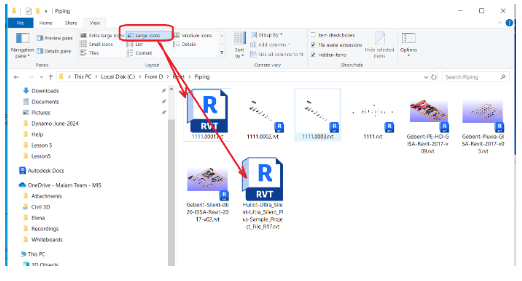
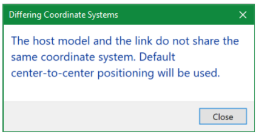
כיצד אפשר למקם את המתקן (Plant Coordinate System) בקואורדינטות הגלובליות?
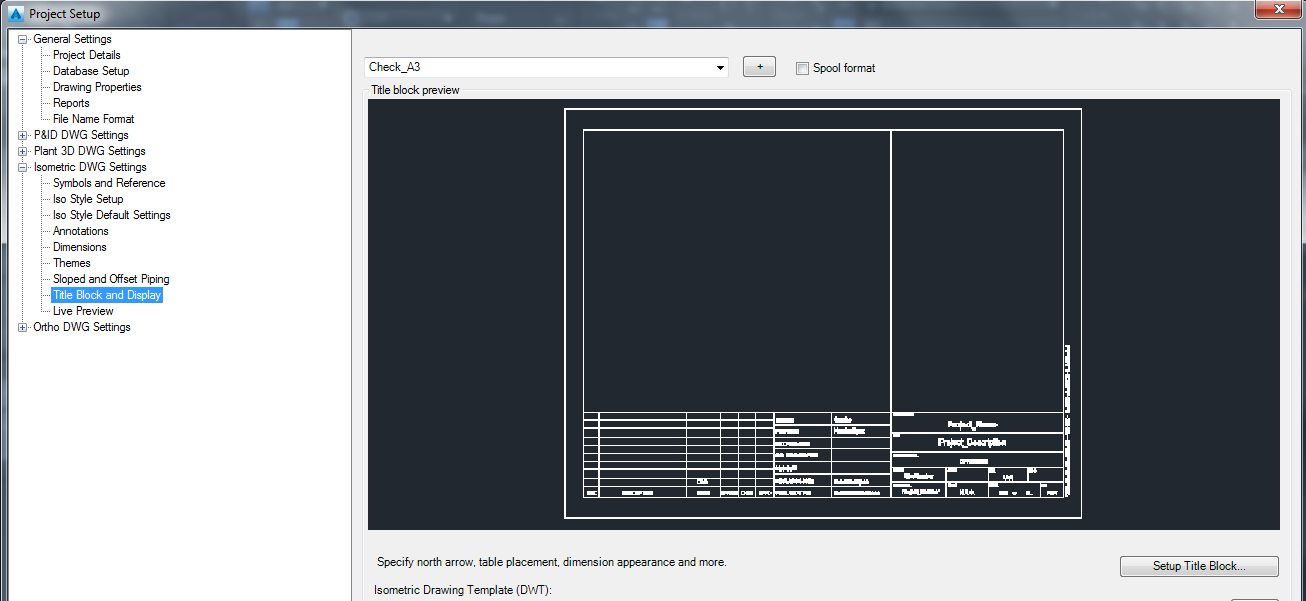
בואו ללמוד כיצד לבנות IsoStyle חדש תוך שימוש בהגדרות סטייל קיים

בואו ללמוד איך לתכנן צנרת עם דופן כפולה במספר דרכים פשוטות
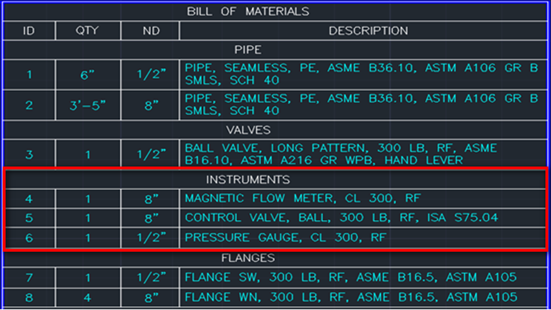
החל מגרסת 2023 תוכלו להציג מכשירים Instruments בטבלת BOM בשרטוטי ISO. כל הפרטים בטיפ המומחה של מקס בודובסקי
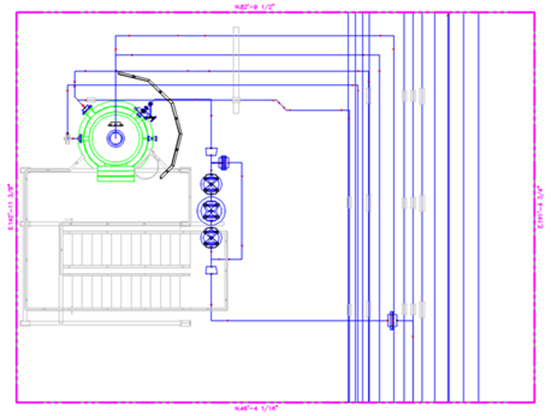
החל מגרסת 2023 תוכלו להציג צנרת כחד קווית בשרטוטי ה-ORTHO לפי קריטריונים שונים. כל הפרטים בטיפ המומחה של מקס בודובסקי
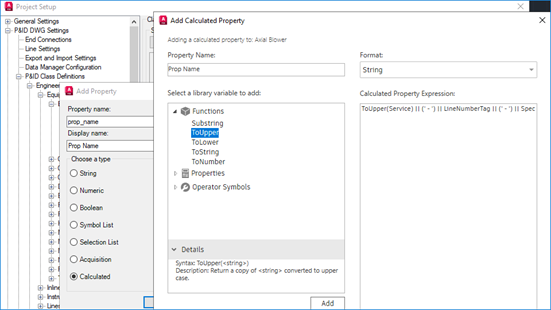
החל מגרסת 2023 תוכלו להוסיף פרמטרים מחושבים ישירות מה-Project Setup. כל הפרטים בטיפ המומחה של מקס בודובסקי
בואו ללמוד כיצד תוכלו לשנות קבוצה לפריטים בטבלת ה-BOM בשרטוט האיזומטריה
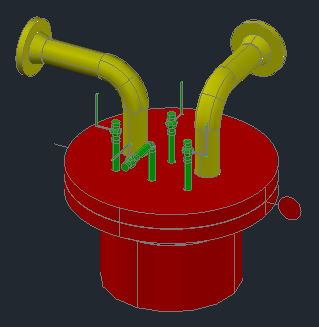
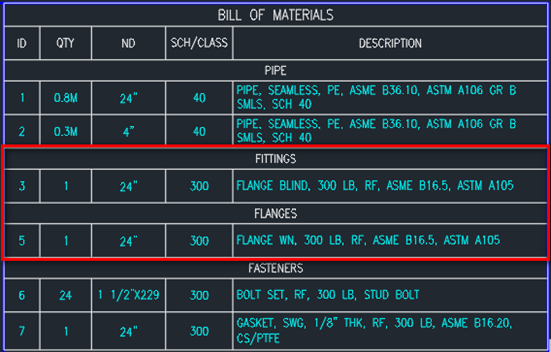
כיצד תוכלו ליישם התחברויות מרובות לאוגן עיוור? כל הפרטים בטיפ המומחה של מקס בודובסקי
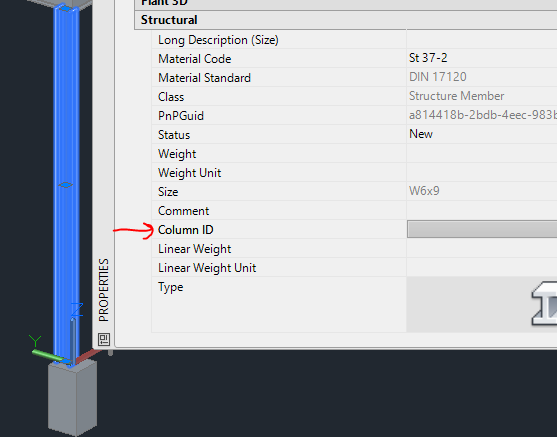
אובייקטים ב-AutoCAD Plant 3D איבדו נתונים (metadata) במאפיינים – מה עושים?
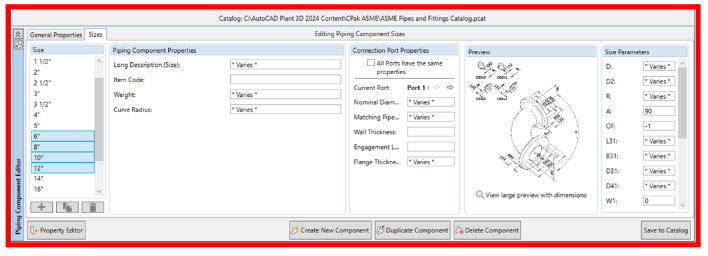
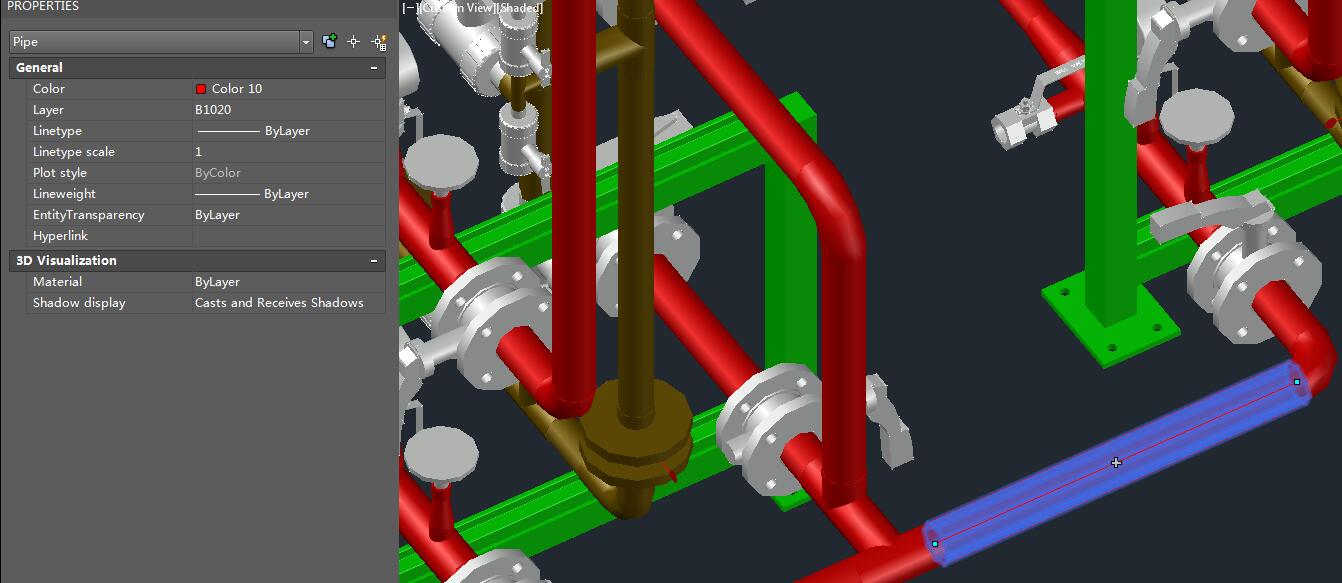
היכנסו לטיפ המומחה של מקס בודובסקי ותלמדו כיצד לשנות באופן גורף מאפייני גודל ב-Catalog Editor
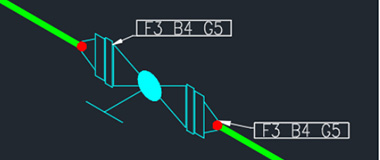
בואו ללמוד כיצד לשנות כיתוב לאביזרים בשרטוטי האיזומטריה בטיפ של מקס בודובסקי
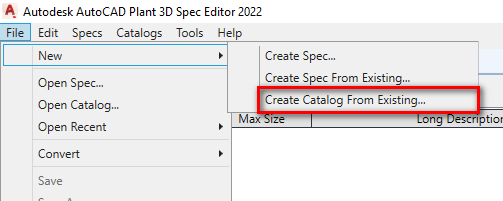
למדו על הדרך היעילה לבניית קטלוג חדש על סמך קיים
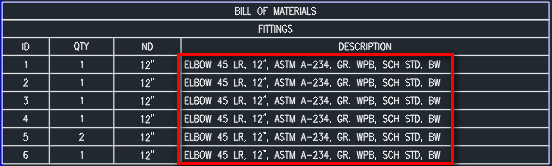
איך לאחד שורות עם תיאור זהה ב-BOM בעת ייצור ה-ISO? כל הפרטים בטיפ המומחה של מקס בודובסקי
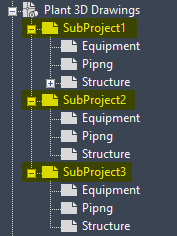
העבודה ב-Plant 3D מוגבלת בשטח. מה עושים כשהפרויקט נפרש על שטח גדול בהרבה מהמגבלה? היכנסו לקרוא בטיפ המומחה של מקס בודובסקי
לעיתים נרצה לחרוג מהגדרת עדיפות לבחירת ברגים ב-Spec עבור חיבורי צנרת מאוגנים
היכנסו לטיפ המומחה של מקס בודובסקי ותלמדו כיצד לשלוט בהורשת ערכי המאפיינים בהיררכיות השונות.

היכנסו לטיפ המומחה של מקס בודובסקי ותלמדו כיצד ניתן להפיק דו"ח לפריטים בודדים
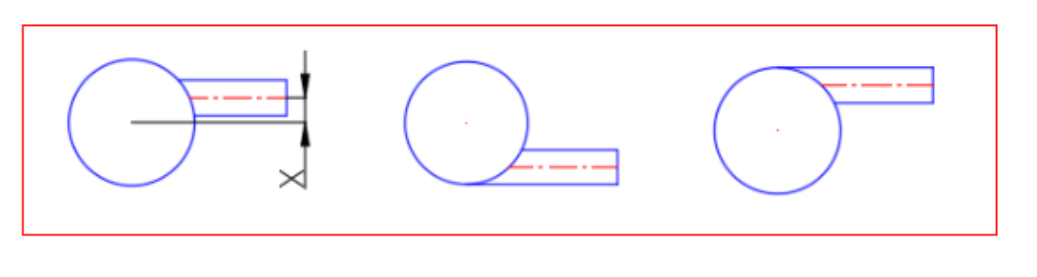
לפעמים אנחנו רוצים להתחבר למפרק צנרת - ELBOW בחיבור ישיר, מה שמכונה STUB-IN
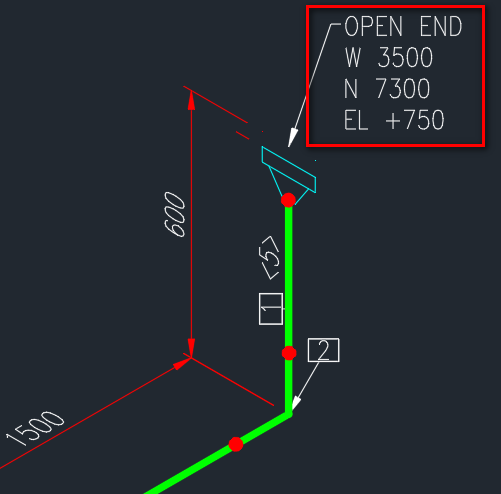
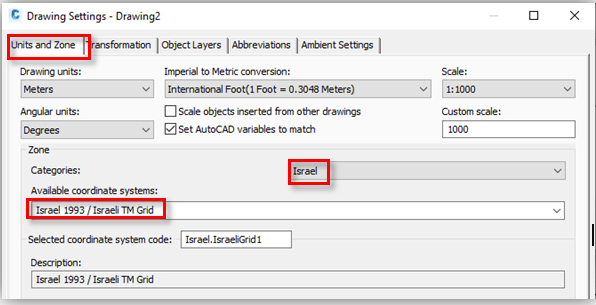
היכנסו לטיפ המומחה של מקס בודובסקי ותלמדו כיצד ניתן לשנות את תצוגת הקואורדינטות למטרים
היכנסו לקרוא כיצד ניתן להוסיף בידוד לקו צנרת ב-PLANT 3D
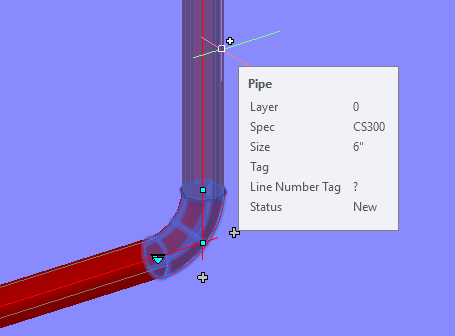
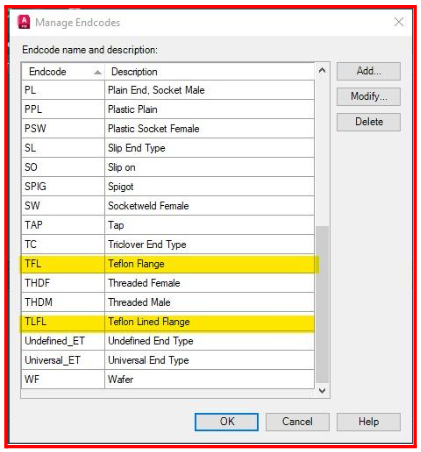
היכנסו לטיפ המומחה של סמי גינדיק ותלמדו כיצד ניתן לשנות פרמטרים של חלק שהגיע מ-SPEC
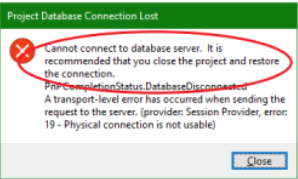
בטיפ זה נלמד מה עלינו לעשות במקרה של נתק בתקשורת במהלך העבודה
בטיפ זה נתייחס לעמוד או לקורה של מודל הקונסטרוקציה
ב- PLANT 3D ניתן להגדיר כל ציוד בצורה פרמטרית כשהייצוג שלו הינו מקורב למציאות אבל בממדים מדויקים

היכנסו לטיפ המומחה של סמי גינדיק ותלמדו כיצד להגיד שמספר הקו ירוץ לפי כל AREA
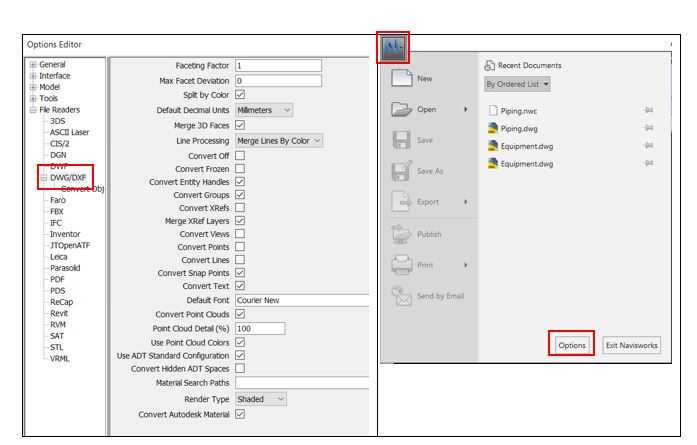
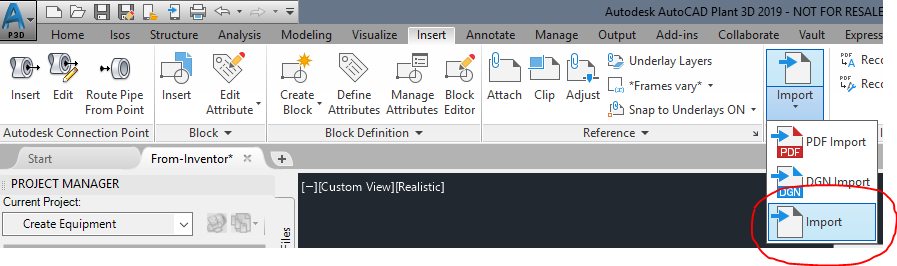
Plant 3D ככל מוצרי Tool Sets AutoCAD מתממשק עם Navisworks בשתי דרכים. היכנסו לקרוא
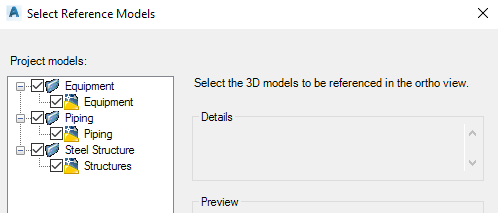
על מנת להפיק Layouts אנחנו משתמשים בOrtho Views, אך יש מספר כללים שיש להקפיד עליהם
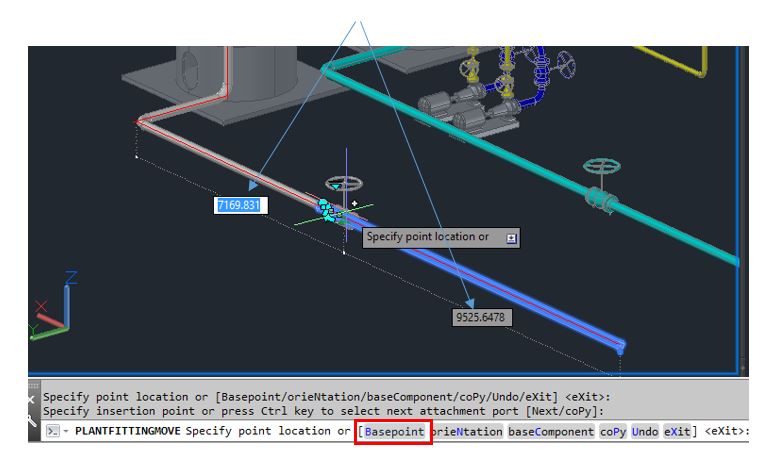
היכנסו לטיפ המומחה של סמי גינדיק ותלמדו כיצד ניתן להזיז רכיבי צנרת לאורך הקו
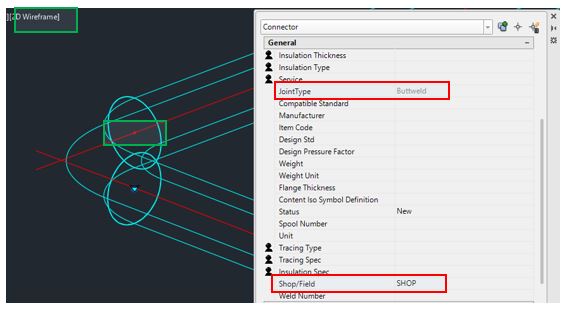
אחד החיבורים הנפוצים במתכת הינו ריתוך. כדי לראות את הריתוכים עלינו לעבור לתצוגת Wireframe
בכל איזומטריה שניצור נתבקש לבחור את ה Style. בין יתר הפרמטרים, ניתן לבחור את כיוון הצפון. כיצד עושים זאת?
היכנסו לטיפ המומחה של סמי גינדיק ותלמדו כיצד לבצע בדיקות התנגשות בין פריטים שונים ב Plant 3D
היכנסו לטיפ המומחה של סמי גינדיק ותלמדו על הגדרות נוספות לברזים, מעבר לפעולות הבסיסיות שאנחנו מכירים
Plant 3D מאפשר להעביר מידע ל Navisworks, אבל קיימת גם האפשרות ההפוכה
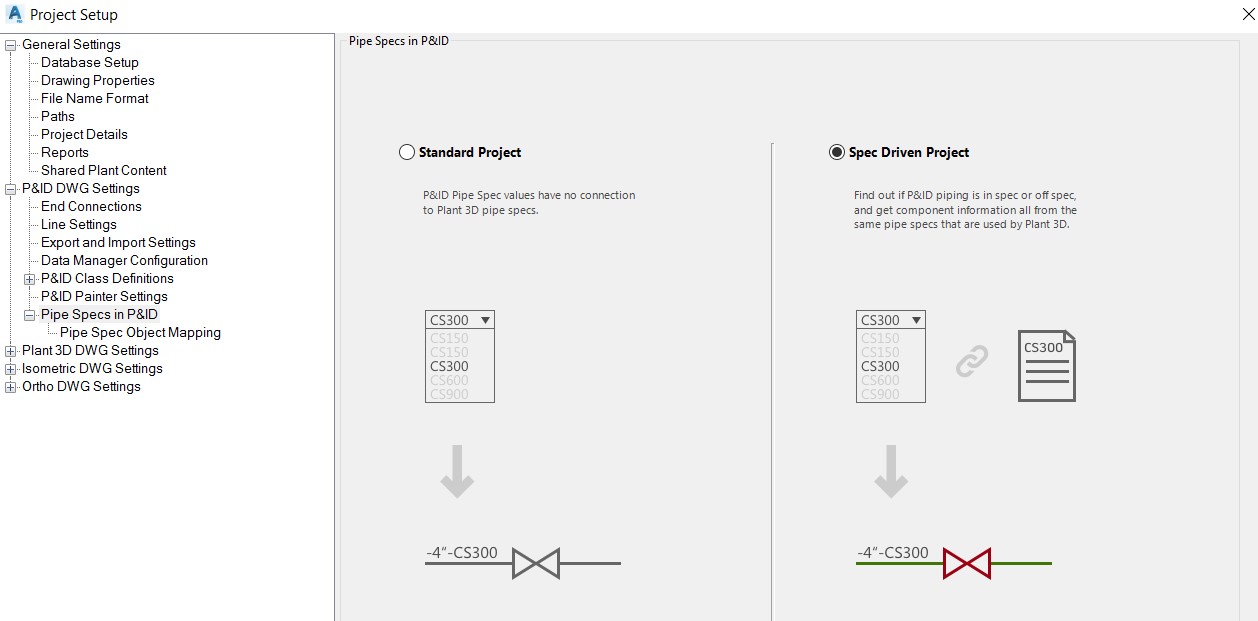
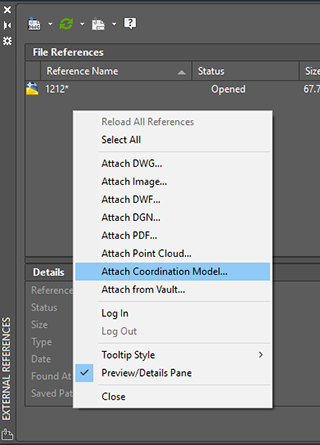
החל מService Pack 1 של גירסה 2017 ניתן להשתמש בתכונה חדשה של בניית רכיבי P&ID אשר מתבססים על SPECS קיימים ב PLANT 3D
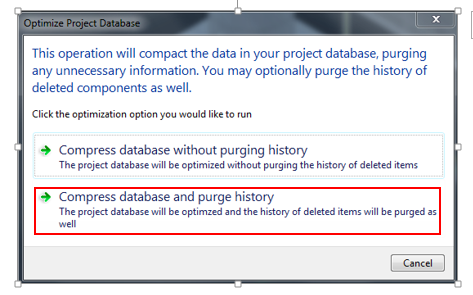
בטיפ זה נרכז את כל הפונקציות שיכולות לשפר את התפקוד של בסיסי הנתונים

היכנסו ללמוד על פקודת PLANTREFRESHACQPROPERTY, המטפלת במשיכת נתונים עבור כל השדות של השרטוט בהתאם לבחירה שלנו
היכנסו לטיפ המומחה של סמי גינדיק ותלמדו כיצד ניתן לעבוד עם CUSTOM PARTS
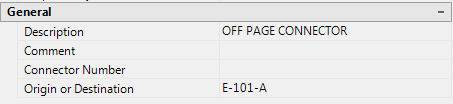
(CONNECTORS (OPC בשרטוטי P&ID חכמים מאפשר לנו להגיע לשרטוטי המשך בקלות בצורה אוטומטית
היכנסו לטיפ המומחה של סמי גינדיק ותלמדו כיצד ניתן לנצל את המידע שהוזן ב P&ID, אודות הקווים והאביזרים
משתמשים ב-AutoCAD Plant 3D? בואו ללמוד בטיפ המומחה של מקס בודובסקי כיצד לתכנן יעיל יותר כאשר יש מס' סוגי חיבורים מאוגנים
משתמשים ב-AutoCAD Plant 3D? בואו ללמוד כיצד למדל ענף לא ממורכז (Eccentric Branch) בקלות וביעילות
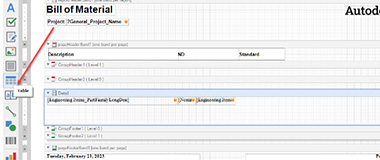
משתמשים ב-AutoCAD Plant 3D? בואו ללמוד כיצד להפיק דוחות באמצעות ה-Report Creator המאפשר מגוון פורמטים
בואו ללמוד כיצד ליצור הצגה גרפית של אטם בחיבור אוגנים בשרטוטי האיזו
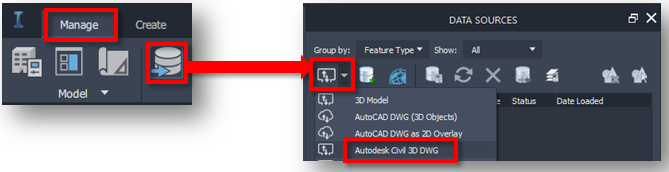
משתמשים בPlant 3D? בואו ללמוד בטיפ המומחה של סמי גינדיק המפרט איך להעביר פרויקט לענן בצורה יעילה וחלקה

רוצים להאיץ ולייעל את העבודה ב-Revit? דבי רוח משיח על Revit Families, העקרונות, השיטות והיתרונות בכלי העצמתי ביותר בתכנה

דבי רוח משיח על קורס Revit למעצבי פנים - בואו ללמוד כיצד לשדרג כישורים ולהפוך את תהליך התכנון והביצוע לחכם, יעיל ומקצועי יותר.
דבי רוח משיח על קורס BIM Manager - בואו לקחת את הקריירה שלכם לשלב הבא ולהוביל את תחום ה-BIM במשרדי תכנון
דבי רוח משיח על קורס Dynamo - בואו ללמוד כיצד להפוך את Revit לכלי עוצמתי ואוטומטי
דבי רוח משיח על קורס Revit Structure- בואו להכיר את הדרך הנכונה להפוך למומחי מידול שלד מבנה בשיטת BIM
דבי רוח משיח עם פרטים מלאים על הקורס החדש למידול תשתיות תת-קרקע בשיטת BIM, אל תחמיצו, בואו להתעדכן
איך משלבים בין עולמות המכונה והבניין? בואו ללמוד בטיפ המומחה של אלעד מוסקוביץ' כיצד לייצא הרכבות מ-Inventor ל-Revit
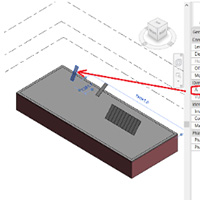
טיפ למשתמשי Revit שיסייע לאתר ולנקות אלמנטים המפוזרים מחוץ למודל ולהנות משליטה מלאה בסביבת העבודה
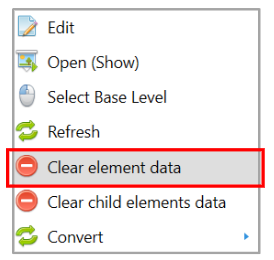
כל הטיפים הכי שימושיים לאפליקציית חישוב שטחים ברוויט Revit– AUTO AREA ROBOT, היכנסו וגלו
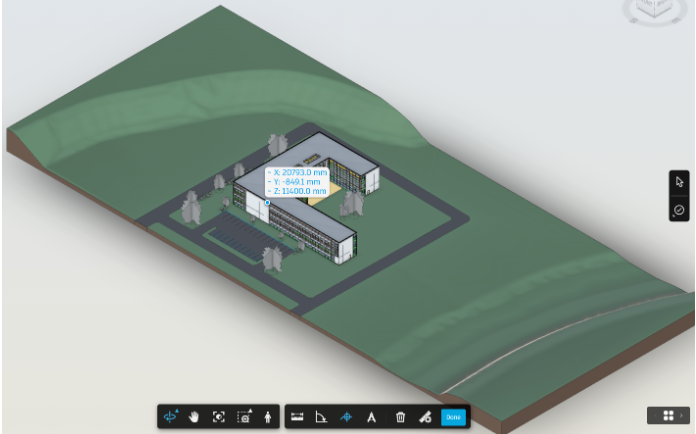
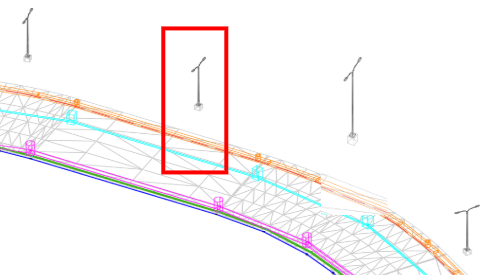
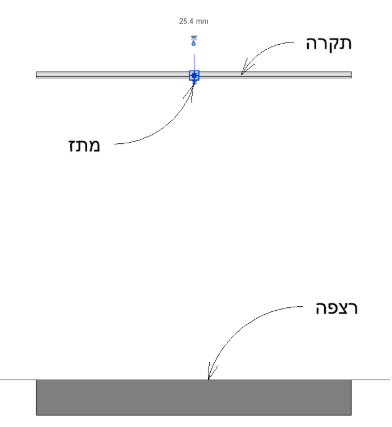
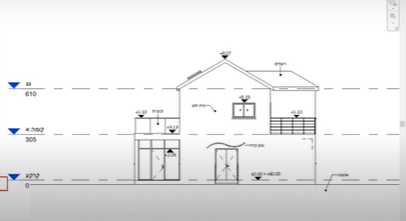
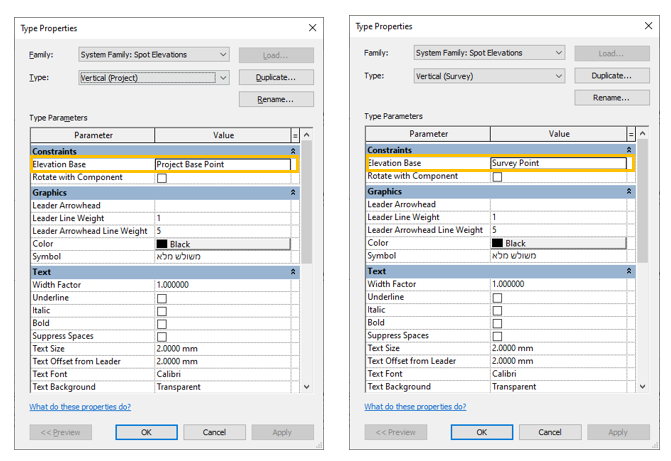
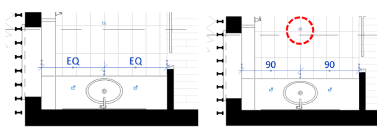
משתמשי Revit, היכנסו לטיפ המומחית שני נורמנטוביץ בנושא סימון נקודות גובה.
היכנסו לטיפ של המומחית רעות בן יהודה וגלו את הכלי לייצור תמונות עבור משפחות בפרויקט
כמה פעמים קרה לכם שבמהלך פרויקט מערכת הקואורדינאטות משתבשת? המומחית שלנו, רעות בן יהודה, בטיפ קצר לעבודה עם כלים בתוסף Environment
המומחית דפנה דובין על השדרוג המשמעותי ב- 2026 Revit, בואו ללמוד כיצד תוכלו להוסיף גמרים לקירות לפי חדרים ולקצר תהליכים
המומחית דפנה דובין על החידוש ב- 2026 Revit, בואו ללמוד כיצד להוסיף גמרים לקירות בפשטות ובדיוק באמצעות אוטומציה חכמה
המומחית דפנה דובין בטיפ למשתמשי Revit, בואו ללמוד כיצד ליצור פרמטר לטובת התאמה אישית של סייר הפרויקט
המומחית דפנה דובין בטיפ למשתמשי Revit להתאמה אישית של סייר הפרויקט שתאפשר לכם עבודה מאורגנת ויעילה יותר
היכנסו וגלו את 15 הטיפים השימושיים ביותר למשתמשי Revit
איך להראות מבט של הריסה ובניה יחד בתוך שלבי הבניה ברוויט? התשובה מחכה לכם בטיפ
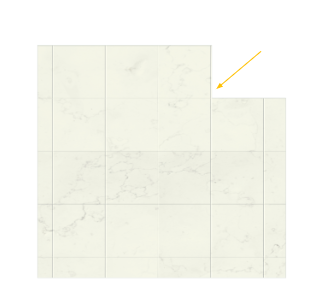
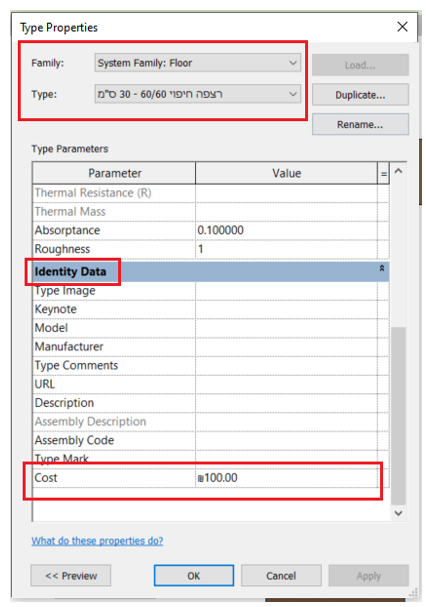
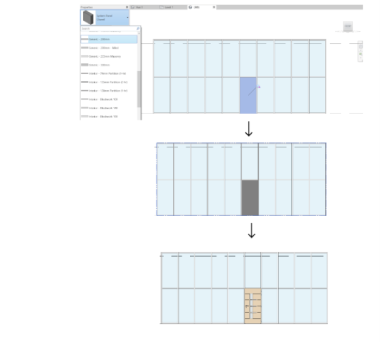
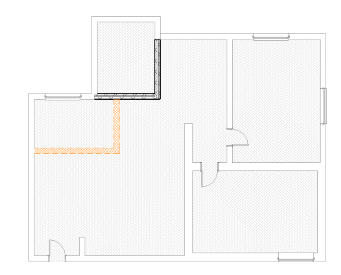
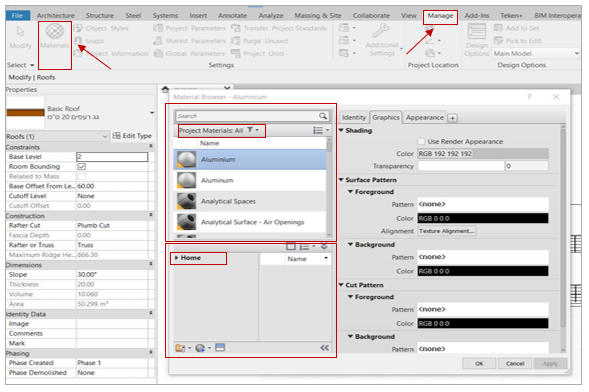
כיצד ליצור אריחי רצפה זהים בשרטוט ובהדמיה, ולהבטיח שהתכנון שלכם יראה בדיוק כפי שדמיינתם - מהרעיון ועד לתוצאה הסופית!
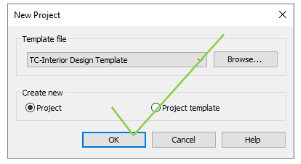
מחפשים דרך יעילה וקלה למציאת הטמפלייט? היכנסו לטיפ המומחית דפנה דובין וגלו כיצד לעשות זאת
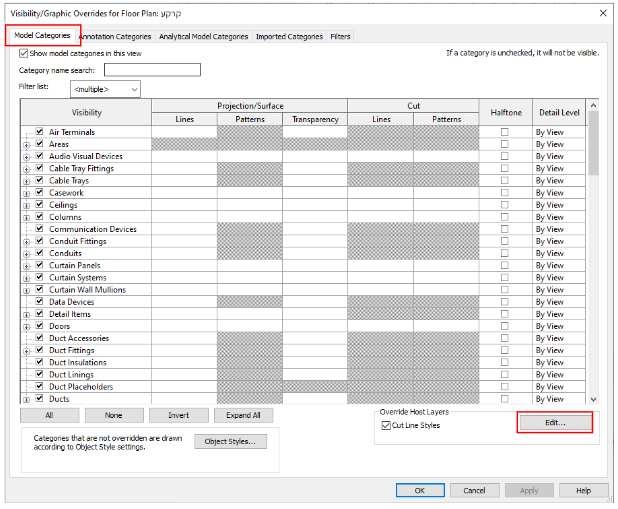
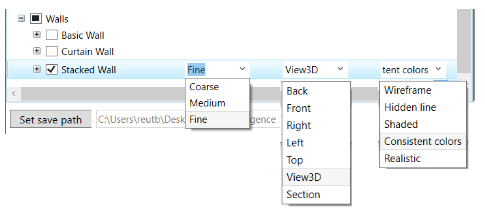
דפנה דובין המומחית שלנו ל-Revit בטיפ להצגת השכבות בקיר שיצרתם ב-Revit באופן תקין וברור גם בהדפסה, בואו לקרוא
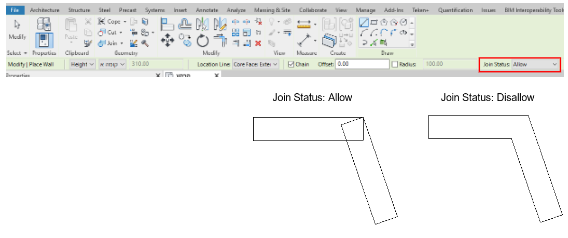
דפנה דובין המומחית שלנו ל-Revit בטיפ ליצירת חיבור קירות אופטימלי במספר צעדים פשוטים, בואו לקרוא
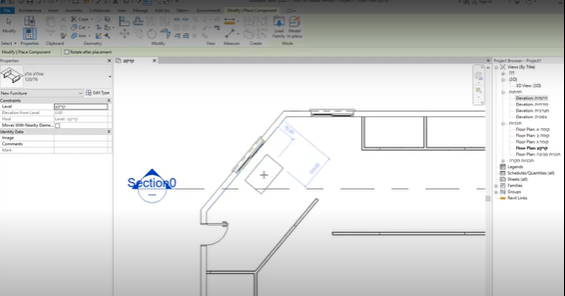
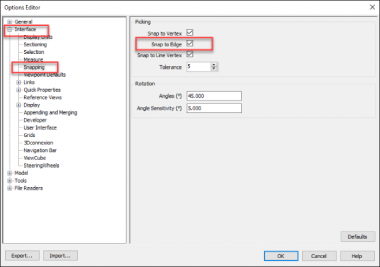
בעת הצבת קומפוננט, לעיתים אנו נדרשים לבצע פעולת סיבוב (Rotate) או יישור (Align)
אפשרות ה-Temporary View Properties מאפשרת שני מצבים. היכנסו לקרוא
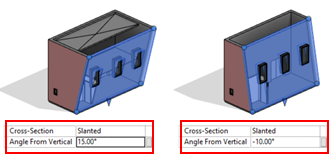
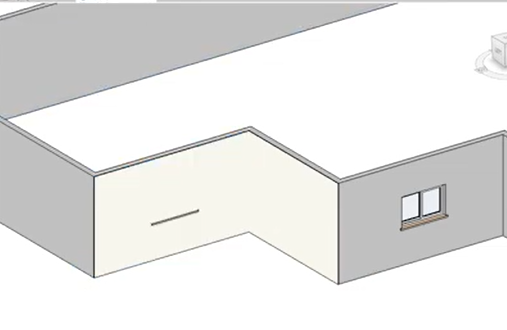
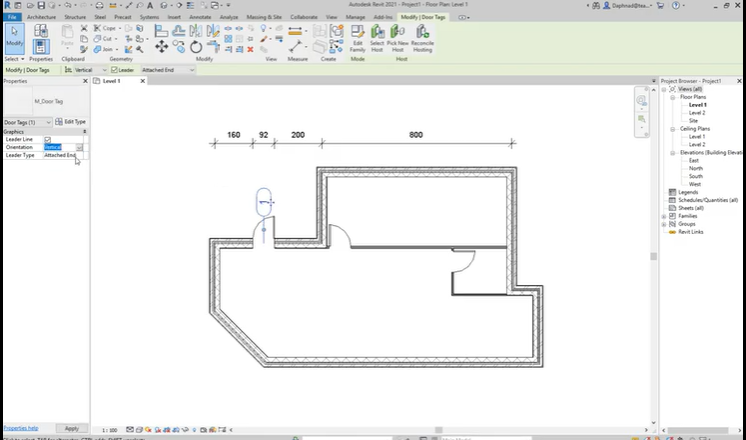
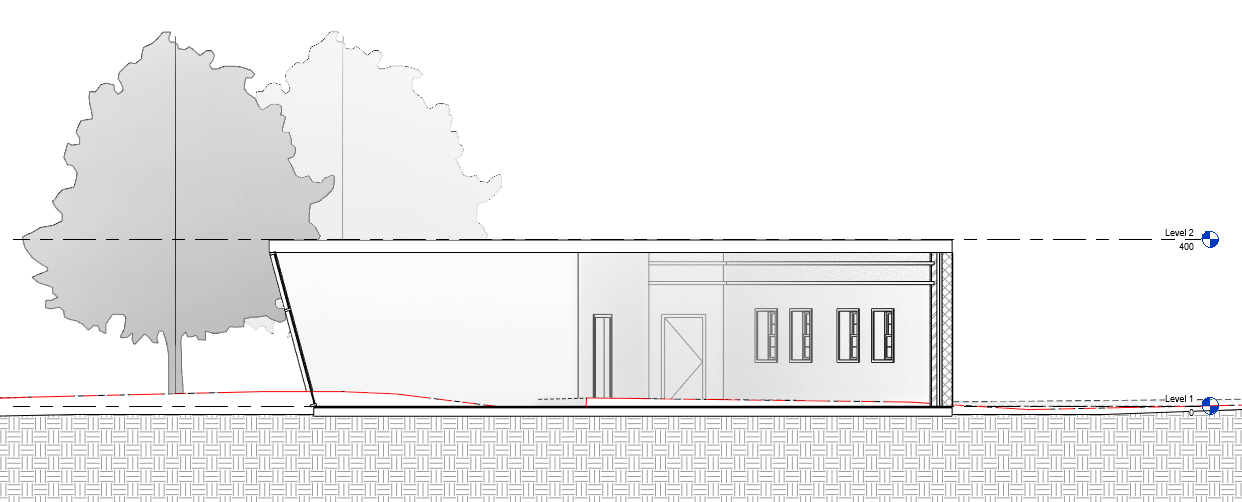
אחד החידושים בגרסת Revit 2021 הוא יצירת קירות אלכסוניים/נטויים
לעיתים בעת עבודה ב- Revit נדרש לפצל בין שכבות הקיר עבור אי אילו סיבות
גרסת 2021 Revit הביאה עמה חידושים רבים, אחד מהם הוא היכולת לבצע סיבוב לאלמנט

איך להעביר עברית מ-Revit ל-AutoCAD עם אפליקציית WinHEB?
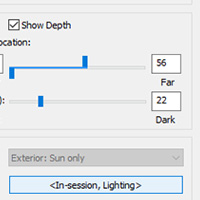
החל מגרסת Revit 2022 נוכל לשנות ולעדכן את נראות קו הקרקע הקיים בנוחות מרבית. כיצד עושים זאת? כנסו וקראו
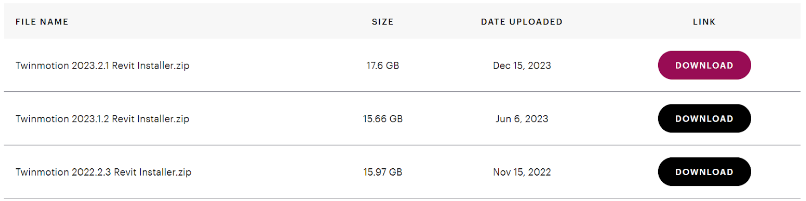
היכנסו לטיפ המומחה של דפנה דובין וצפו בוובינר המסביר על ההבדלים בין התוכנות
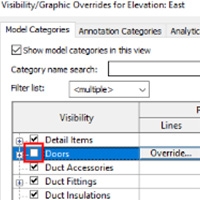
גרסת Revit 2022 הביאה עמה שדרוגים רבים, ואחד המשמעותיים שבהם עוסק ביכולת להוסיף התייחסות ל-PHASE בתוך ה-FILTER. היכנסו לקרוא
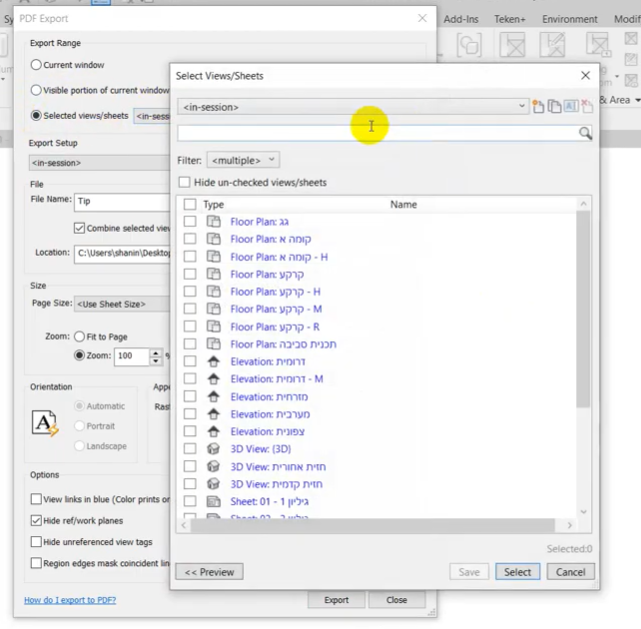
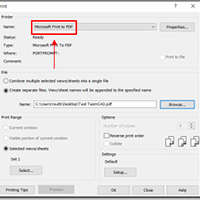
היכנסו לקרוא כיצד הייצוא ל-PDF בגרסה החדשה של REVIT 2022 משתדרג ומקל עלינו את העבודה בתוכנה
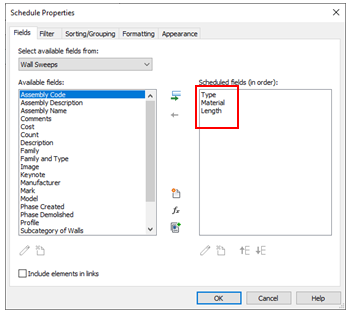
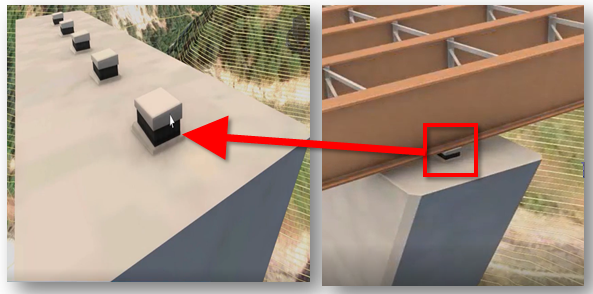
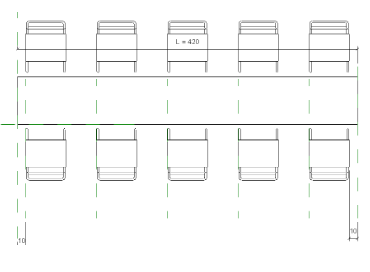
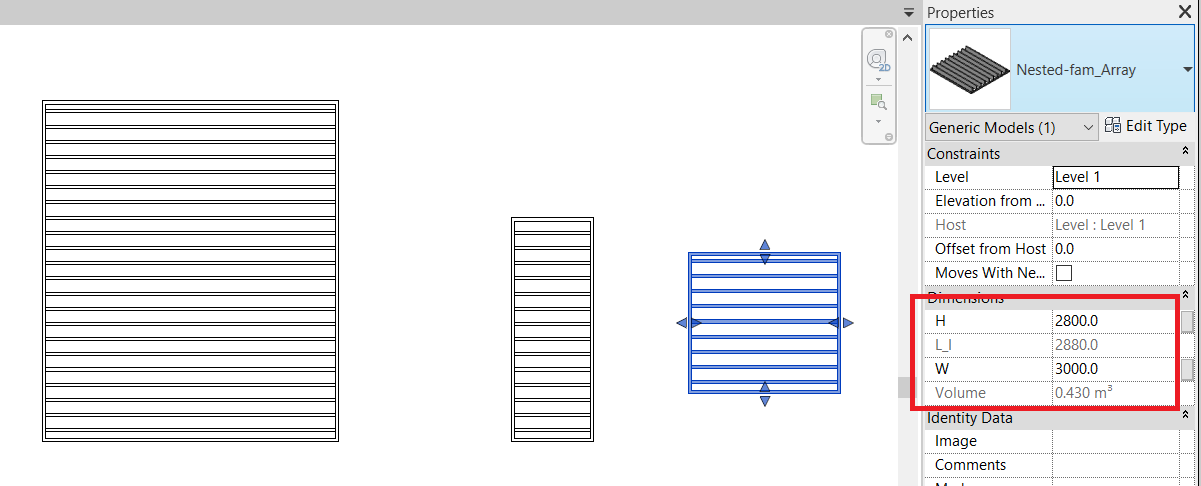
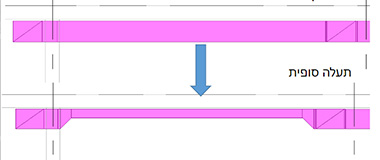
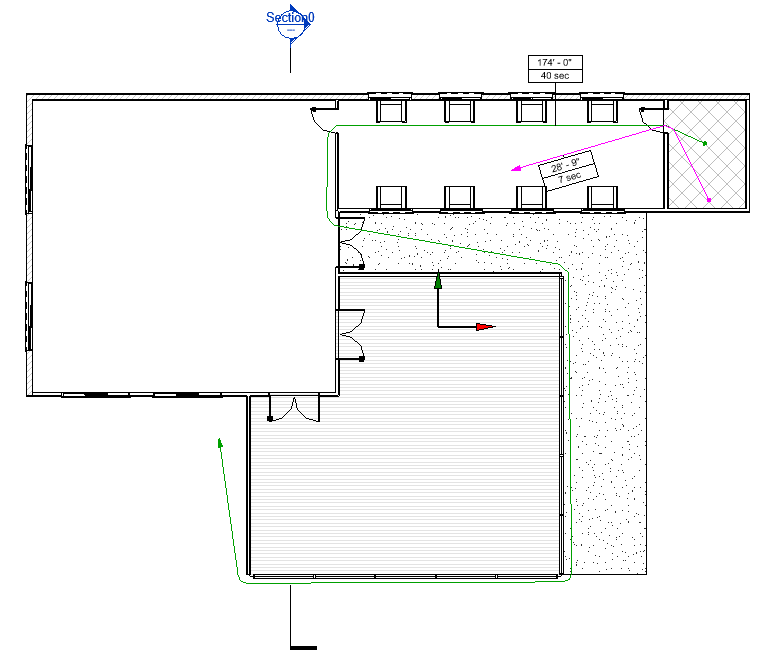
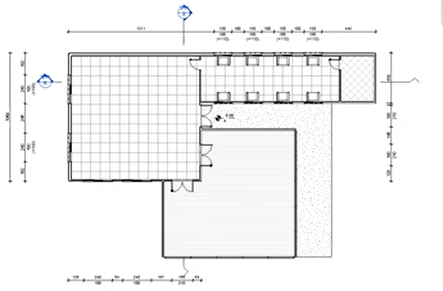
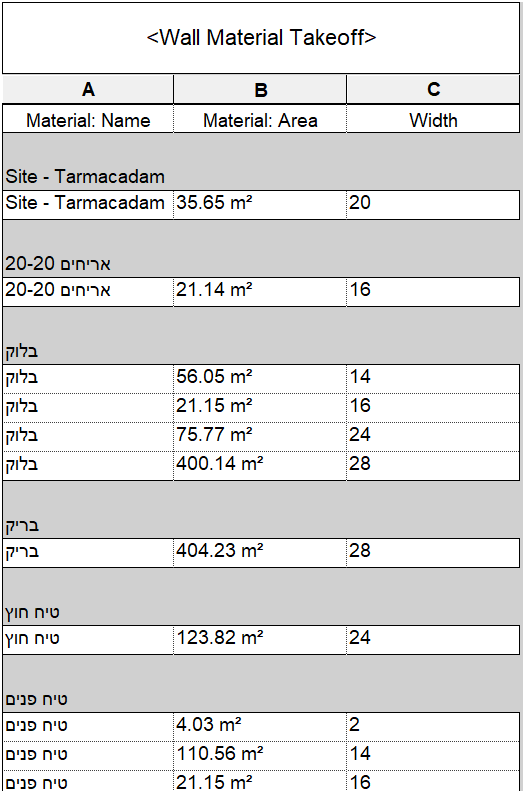
כיצד יודעים מהו אורך מטר רץ של הפאנלים במבנה? האם Revit יכול לתת לנו את המידע הזה?
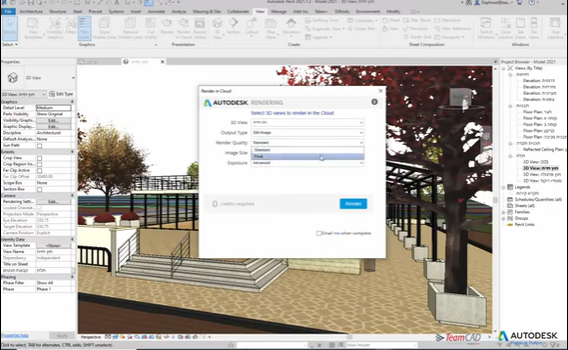
היכנסו לטיפ המומחה של דפנה דובין וקראו על ממשק ה-Render In Cloud המאפשר לנו להשתמש בשרתים של אוטודסק לצורך יצירת הדמיה
היכנסו לטיפ המומחה של דפנה דובין וקראו איך משנים את גובה כל המפלסים בבת אחת
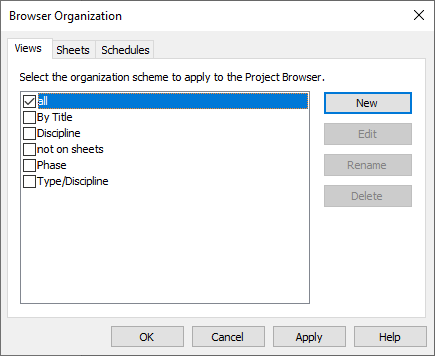
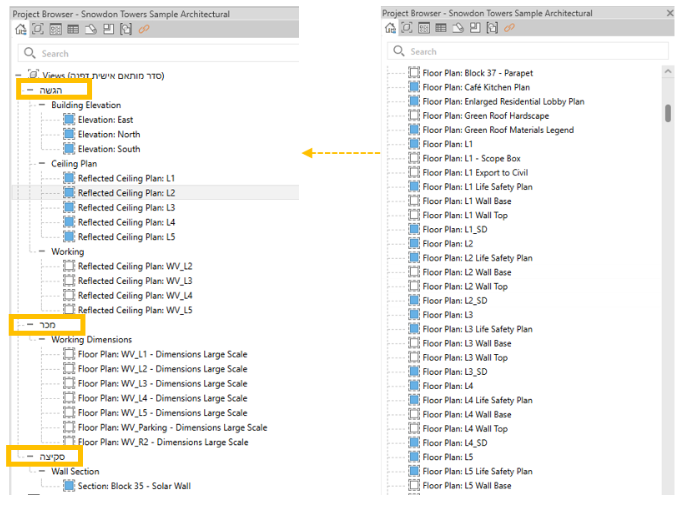
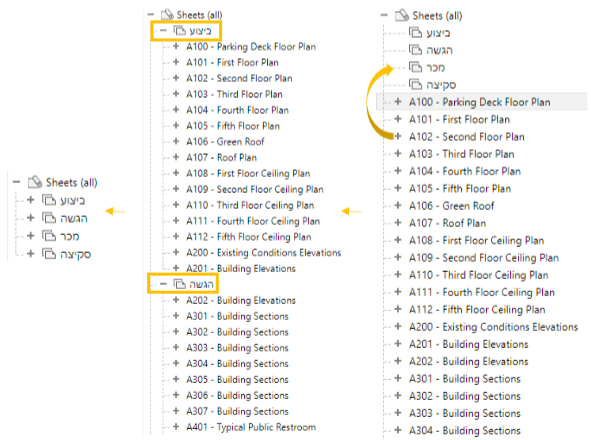
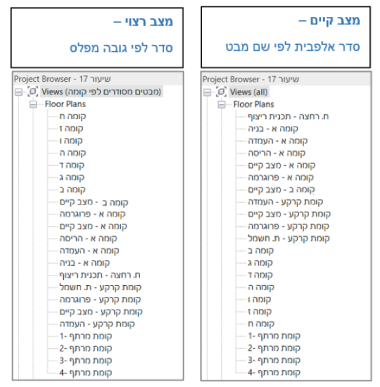
כיצד ניתן להיעזר ביכולות הסידור הפנימיות של סייר הפרויקט בתוכנה לתועלתנו ואף ליצור סדר פנימי מותאם אישית?
העדכון האחרון של Revit 2021.1 הביא עמו מענה נוסף לתקשורת בין משתמשי ה- Revit וה- BIM לבין משתמשים אחרים. היכנסו לקרוא
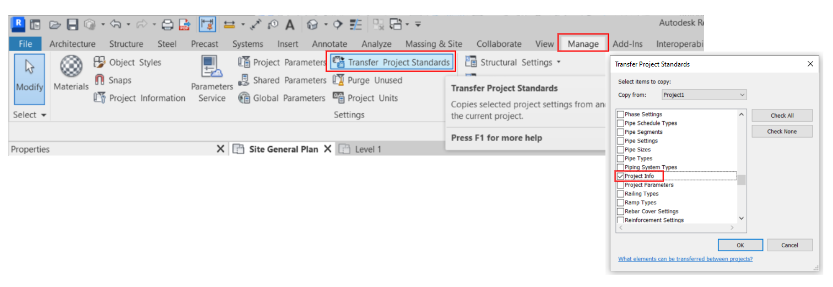
היכנסו לטיפ המומחה של דפנה דובין וגלו כיצד להעביר את הגדרות סגנון הייצוא האישי בין קבצי Revit שונים
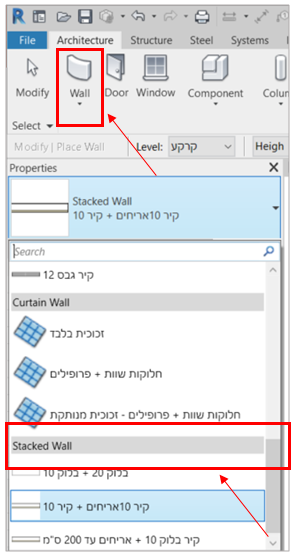
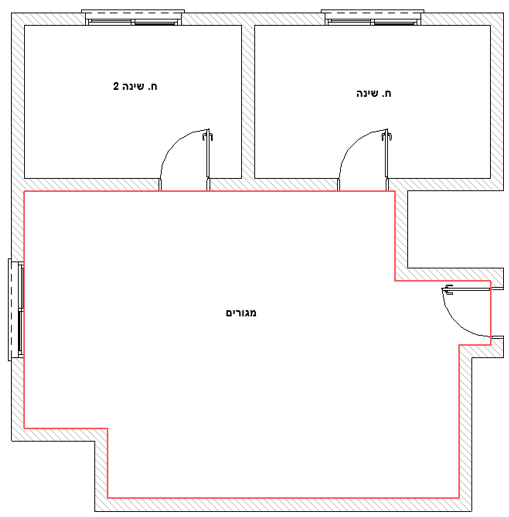
היכנסו לקרוא על פקודת stacked wall, אשר משמשת אותנו כאשר אנחנו רוצים קיר שמתחלק לכמה סוגים שונים
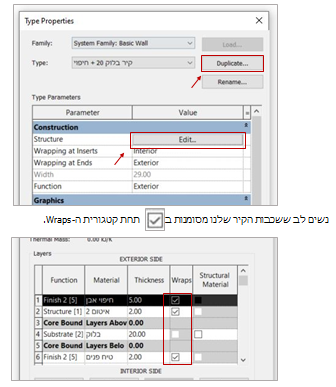
היכנסו לקרוא על פקודת Wall wrapping בטיפ המומחה של שני נורמנטוביץ
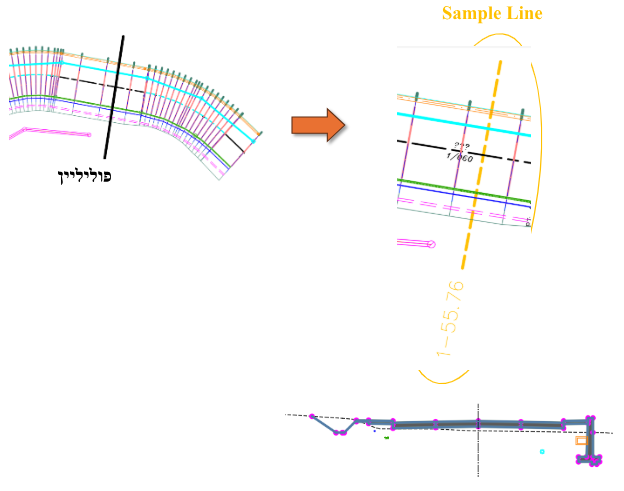
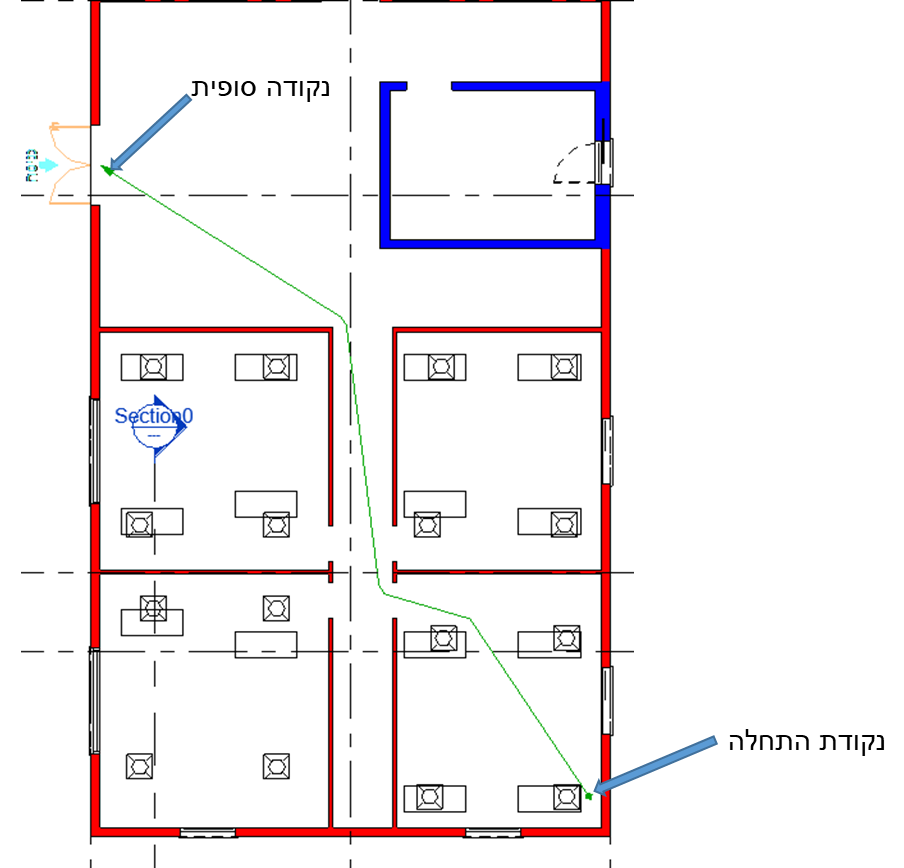
בטיפ זה נתמקד באופן העברת המידע של מסלול ההליכה לפי חתך של אורך הזמן שיש לביצוע הדרך
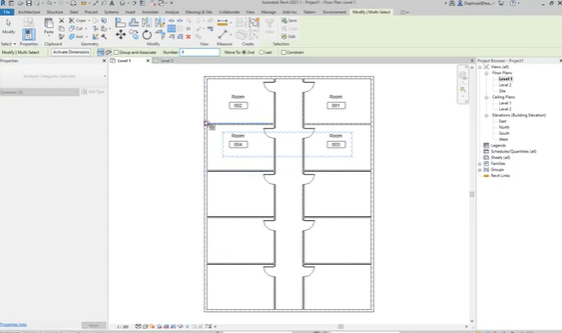
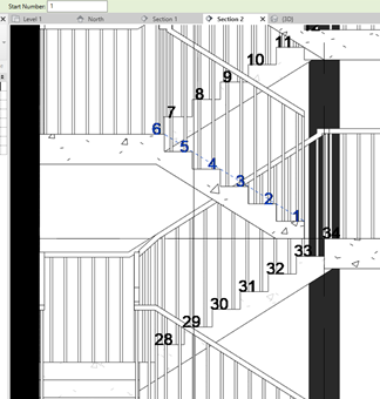
היכנסו לטיפ המומחה של דפנה דובין וצפו בסרטון המדגים את אופן יצירת מספרי חדרים עוקבים
כיצד ניתן להתאים את אוריינטציית המודל לזווית הרצוייה כך שיתאים לנו לפי הצורך הנדרש?
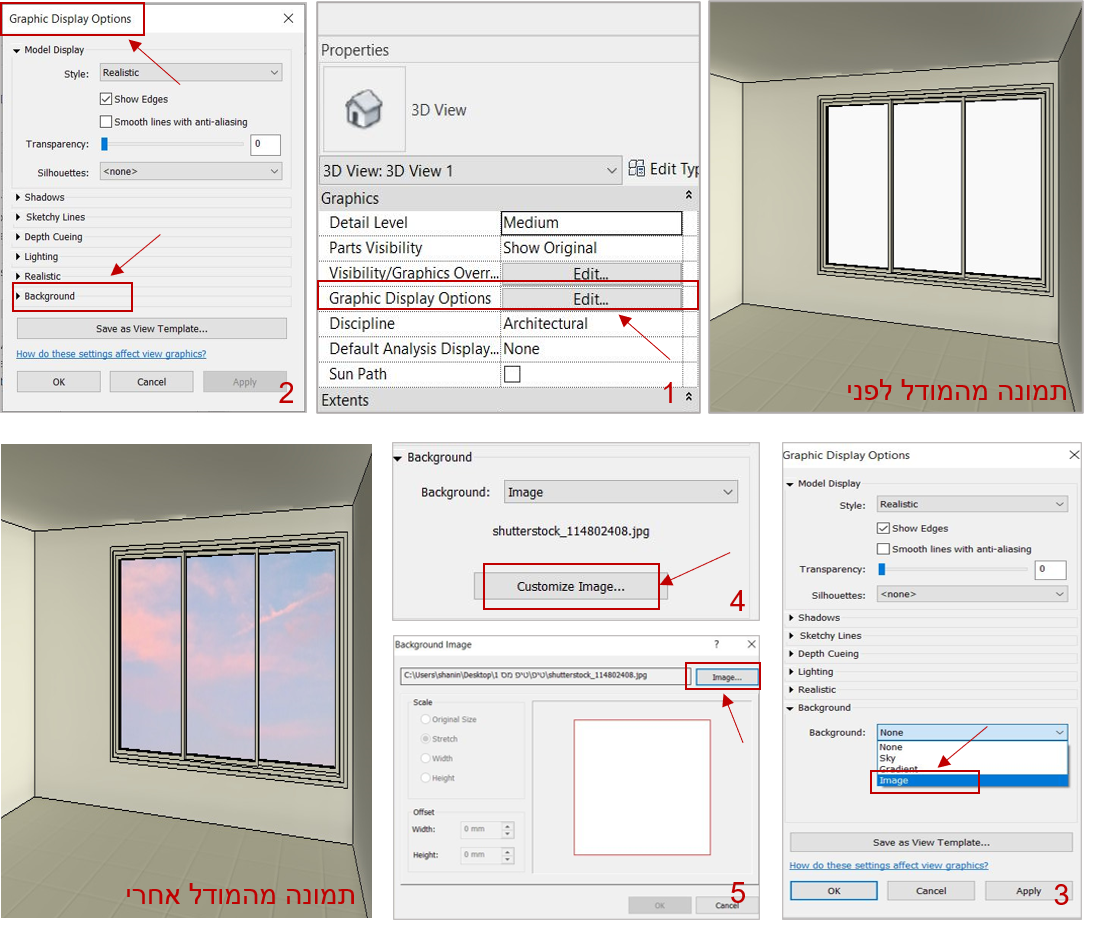
היכנסו לטיפ המומחה וקראו כיצד ניתן להטמיע תמונת רקע בהדמיית פנים לפרזנטציה
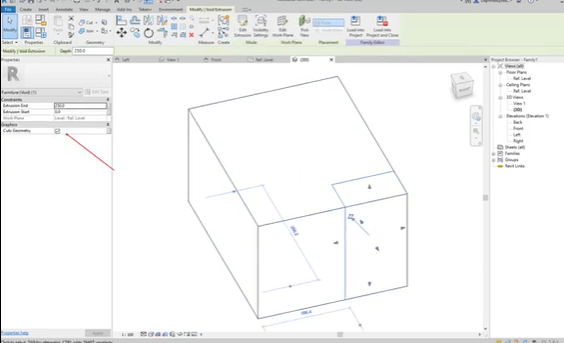
סביבת המשפחה בגרסת 2021 קיבלה שדרוג קטן בהקשר של Void, היכנסו לקרוא
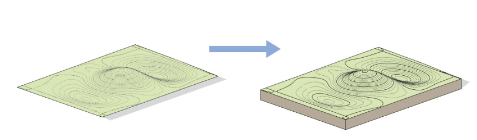
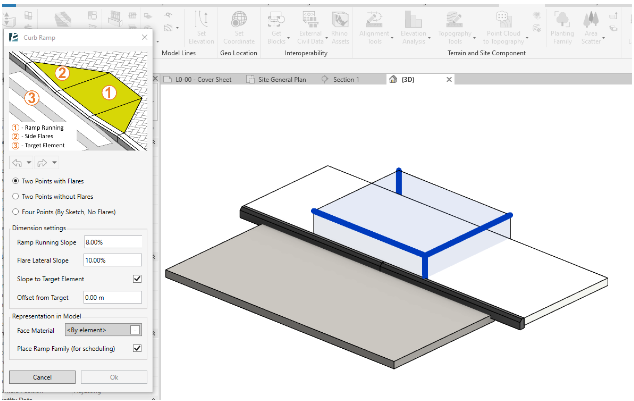
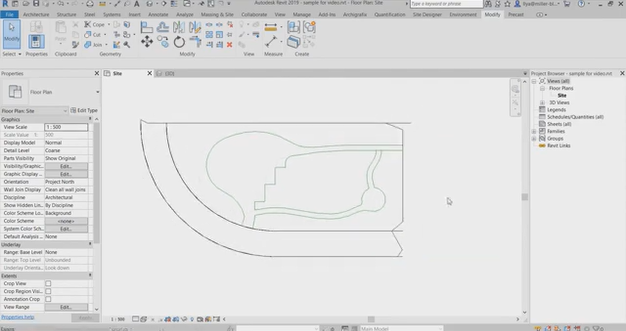
מתכננים ב-Revit? בואו להכיר את Toposolid, הפקודה החדשה בגרסת 2024, בטיפ המומחה של רעות בן-יהודה
דפנה דובין המומחית שלנו ל-Revit במגוון טיפים חיוניים על ייבוא קבצי אוטוקד לתוך Revit לעבודה יעילה יותר, היכנסו לקרוא
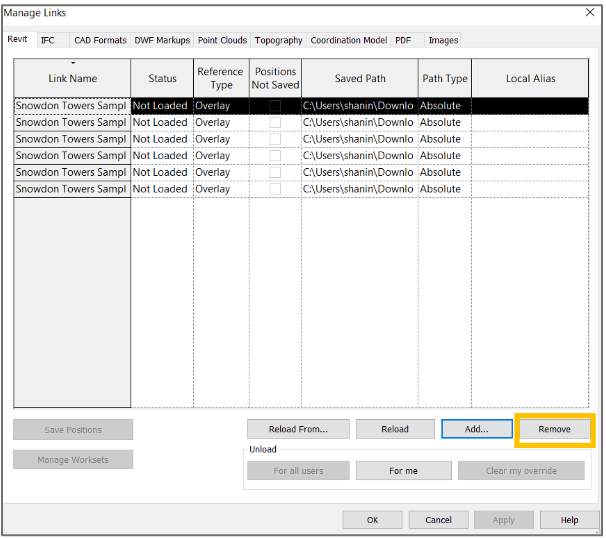
המומחית שני נורמנטוביץ עם מבחר טיפים לעבודה עם לינקים ב-Revit, היכנסו ללמוד, לחסוך זמן יקר ולייעל את העבודה בתוכנה
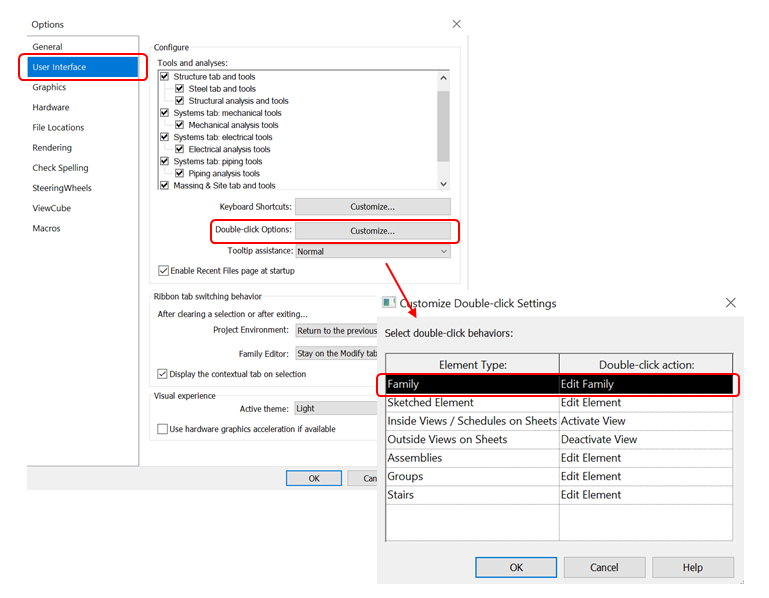
מהם השלבים שנדרשים מאיתנו כך שלא ניכנס לעריכת המשפחה בלחיצת Double קליק?
דפנה דובין המומחית שלנו ל-Revit עם סרטון המסביר את החלוקה בין "חתכי עבודה" לעומת "חתכי הגשה"
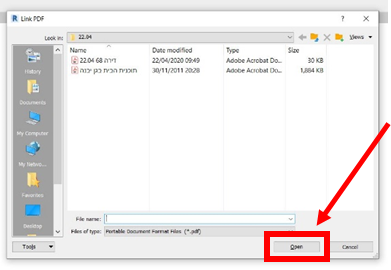
בגירסה החדשה של 2021 Revit קיימת אפשרות של הטמעת קישור לקובץ PDF או לקבצי תמונה במבט דו-מימד. היכנסו לקרוא

היכנסו לקרוא כיצד להשתמש בכלי העבודה Linework, המאפשר לנו לשנות סגנון של קו במבט בו אנו נמצאים
המומחית שני נורמנטוביץ עם מבחר טיפים פשוטים ליישום שיסייעו לכם בשמירה על בריאות הקבצים והימנעות מקבצים כבדים ואיטיים
המומחה יניב סטולר מגלה את סודות ה-BIM! בואו ללמוד כיצד למדל גשר ב-Infraworks ולייצא ל-Civil3D ו-Revit
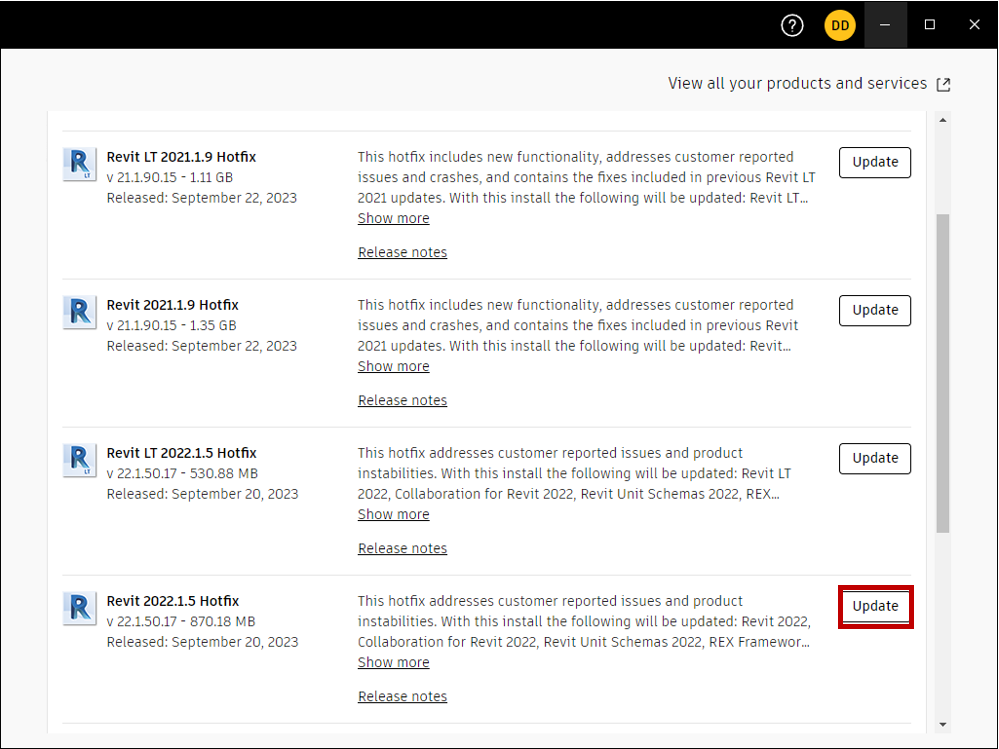
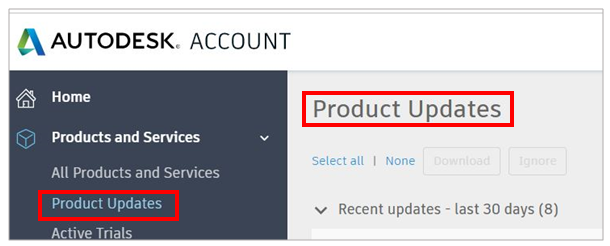
דפנה דובין המומחית שלנו ל-Revit בטיפ חיוני במיוחד עם כל מה שאתם צריכים לדעת על עדכון גרסת התוכנה
מתכננים ב-Revit? בואו ללמוד כיצד למקם לינק במנח שונה על ה-Site שלו
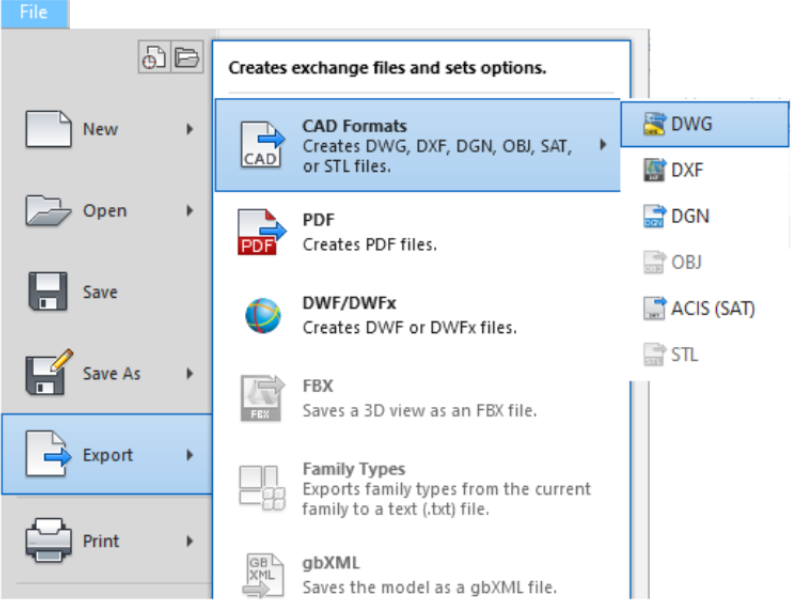
דפנה דובין המומחית שלנו ל-Revit עם טיפ חיוני לביצוע המרה טובה ויעילה למשתמשי הקצה, בין קבצי Revit ל-AutoCAD
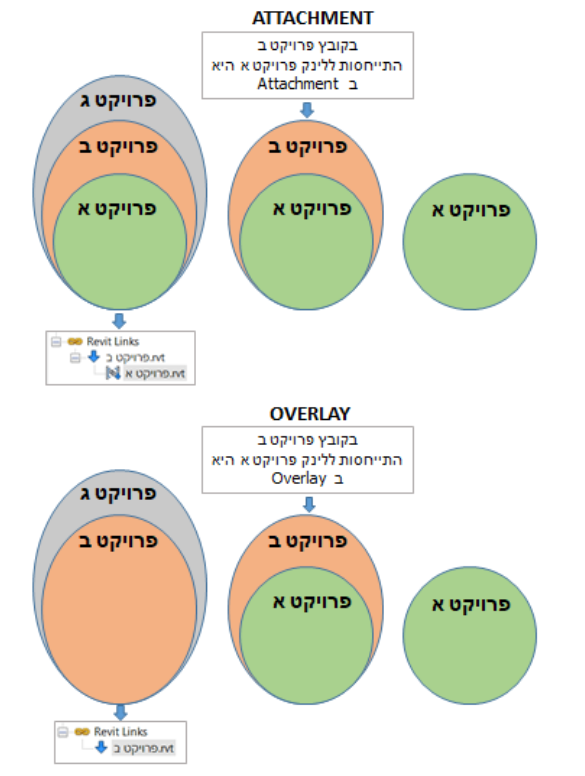
היכנסו לטיפ המומחה של שני נורמנטוביץ על ההבדלים בין ההגדרות Overlay ו-Attachment

מדי פעם אנחנו נתקלים בבעיות של קובץ תקול או סימון Broken ב-BIM 360. בטיפ זה נציג בפניכם באלו תווים כדאי להשתמש ובאלו פחות
בואו להכיר פתרון פשוט לייבוא Hatch מאוטוקאד ל-Revit
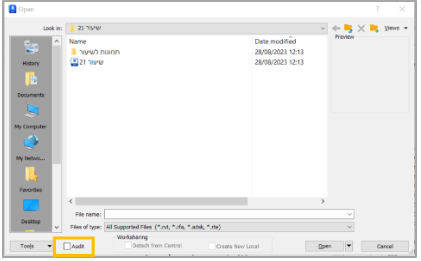
בואו להכיר את הדרך הפשוטה והקלה ביותר לפתור את בעית ההתקנה מחדש ב-Revit 2021
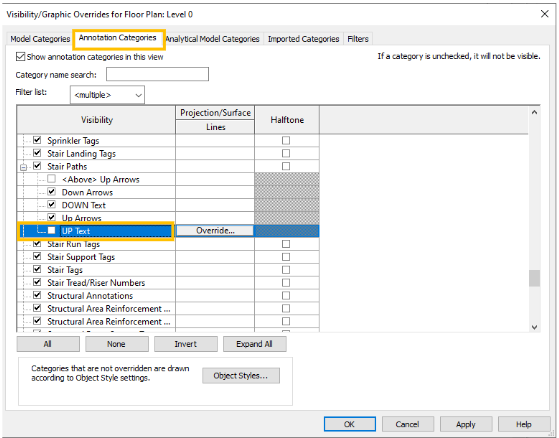
דפנה דובין המומחית שלנו ל-Revit עם טיפ קטן וקולע על האופן שבו תוכלו להציג גרפית מדרגות בתכנית
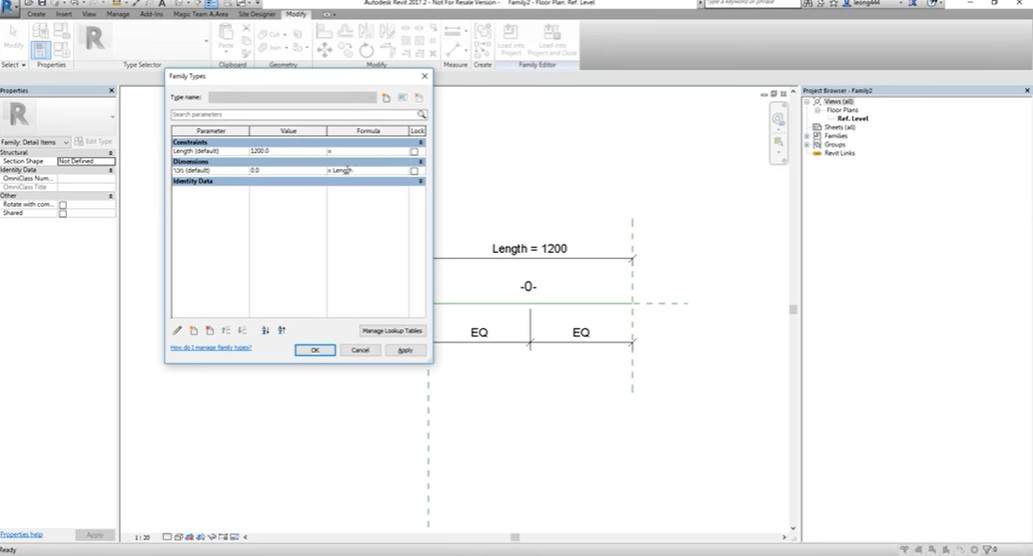
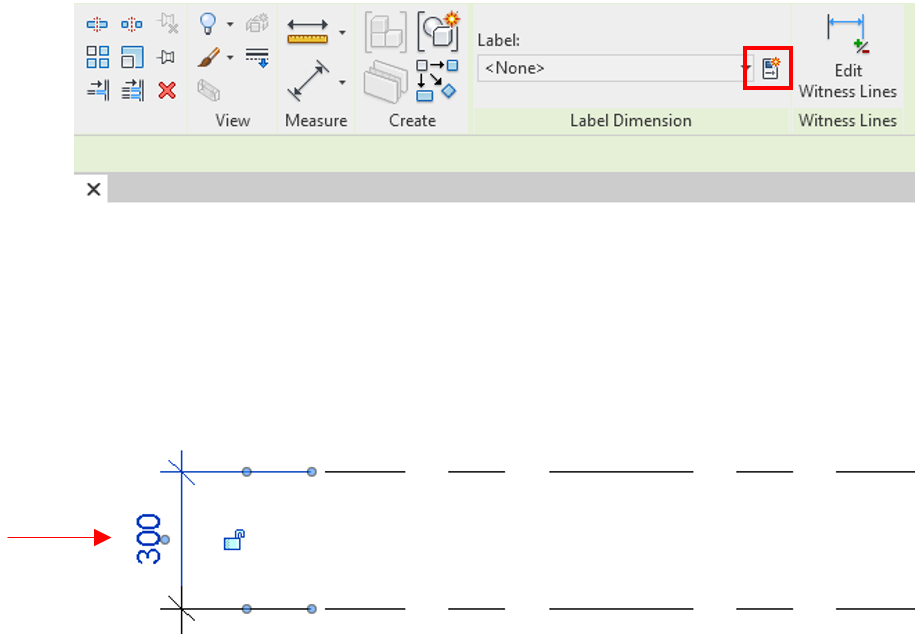
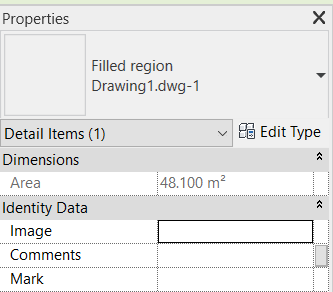
בטיפ זה נלמד כיצד בעזרת יצירת משפחה Detail Item נוכל לקבל מידה פחות הערך הרצוי
בטיפ זה נלמד כיצד להציג פריטים הקשורים לתכנית התקרה
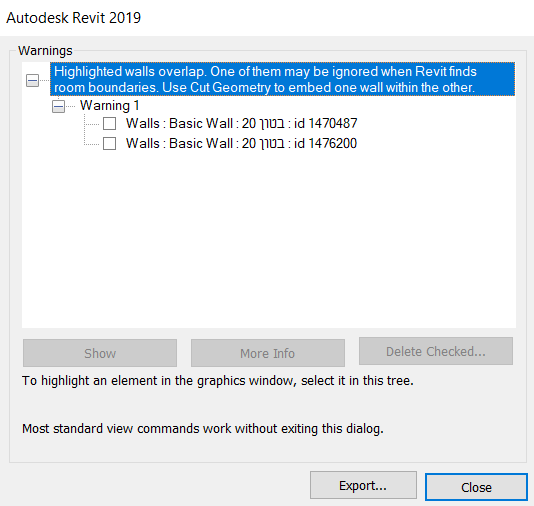
ריבוי התראות משפיע על בריאות הקובץ – ומנקודה זו אסור להתעלם
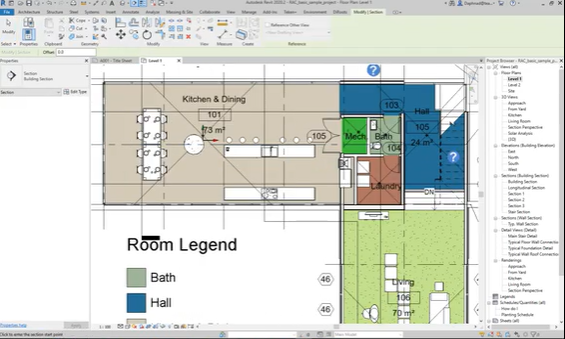
כיצד ניתן להעביר את הבנת המרחב בתכנית למישהו שלאו דווקא בקיא בקריאת תכניות?
חקירת המודל בגרסת 2024 הכוללת חיפוש דינאמי לסינון מבטים בסייר תוך כדי תנועה
חידוש נוסף בגרסת 2024 שיאפשר לכם לפנות מקום בכונן C בעת העבודה בענן BIM
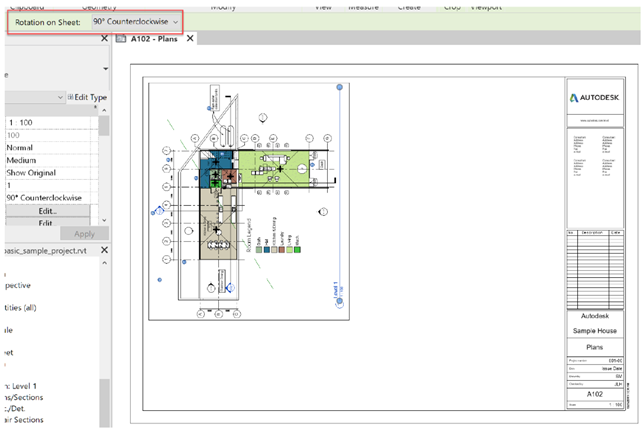
גרסת REVIT 2023 הביאה איתה את היכולת לבצע סיבוב של מבט על הגיליון לפי 90 מעלות עם ונגד כיוון השעון
היכנסו לטיפ המומחה של דפנה דובין ותלמדו כיצד ניתן לעשות שרטוטים גרפיים יפים

מה עושים כPublish settings לא נפתח או Save& close לא מגיב? היכנסו לקרוא
כיצד אנחנו יכולים לכמת חלק מסוים ולא את המודל כולו? היכנסו לקרוא

היכנסו לטיפ המומחה של דפנה דובין ותכירו 2 אפשרויות עיקריות למרכוז פריט
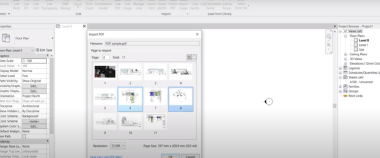
איך מעבירים קובץ PDF ישן ל-REVIT? היכנסו לקרוא בטיפ המומחה של דפנה דובין
היכנסו לטיפ המומחה של דפנה דובין וצפו בסרטון המציג את כל החידושים שאסור לכם להפסיד
היכנסו לטיפ המומחה של דפנה דובין ולמדו כיצד ניתן לשנות את ברירת המחדל של התוכנה בסייר Project browser

היכנסו להסבר המפורט של דפנה דובין המפרט את ההבדלים בין REVIT ל-REVIT LT
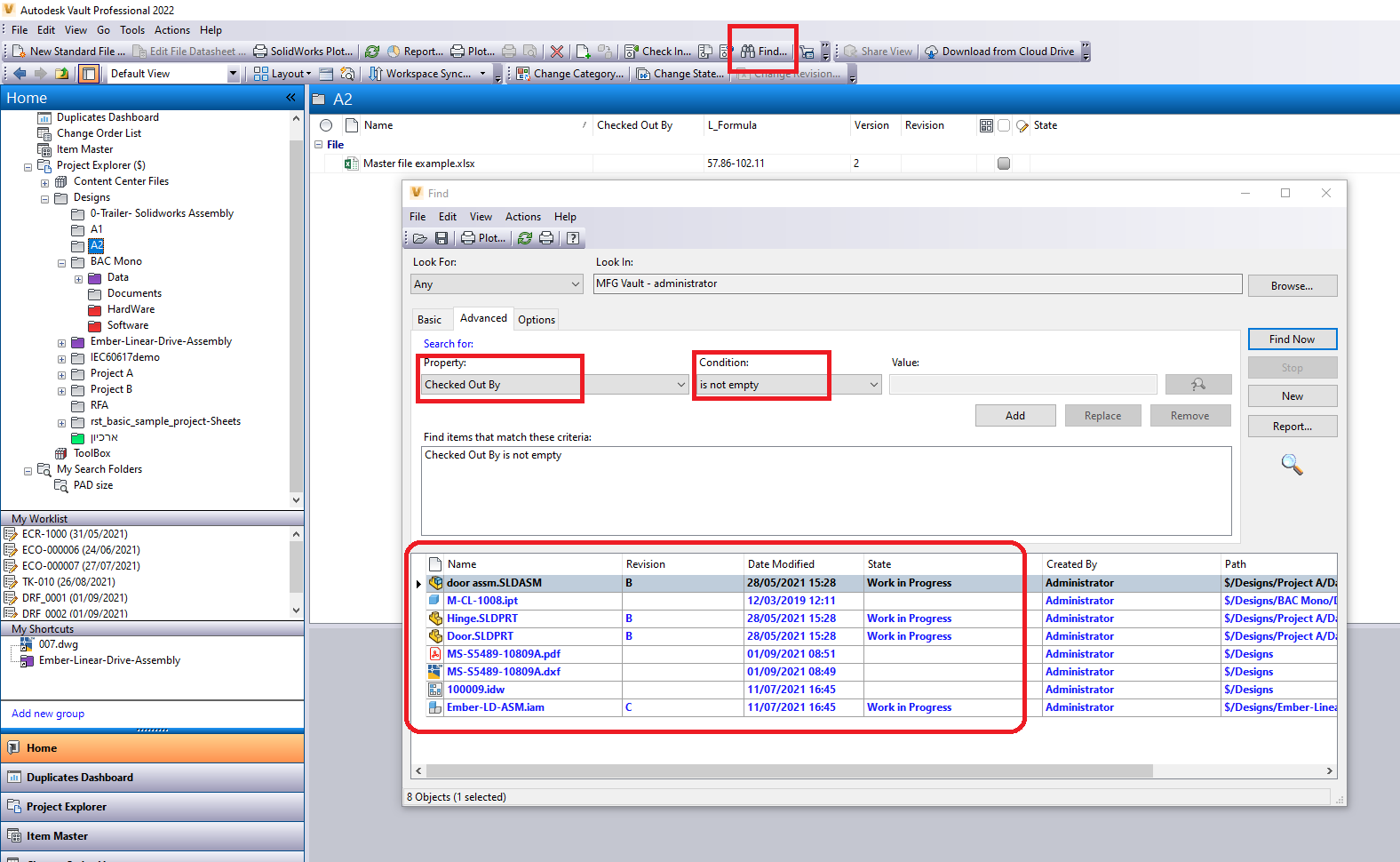
רוצים לעבוד חכם יותר ב-Vault? המומחה איגור פופילבסקי בטיפ ליצירת חיפושים לפי Properties הניתנים לשמירה ושימוש חוזר
המומחה איגור פופילבסקי בטיפ למשתמשי Vault, בואו ללמוד להפיק דוחות חכמים, לייצא נתונים בקלות ולנהל בקרה בהתאמה מלאה
המומחה איגור פופילבסקי בטיפ למשתמשי Vault, בואו ללמוד כיצד להגדיר הרשאות וקבוצות להבטחת תאימות והגברת אבטחת המידע
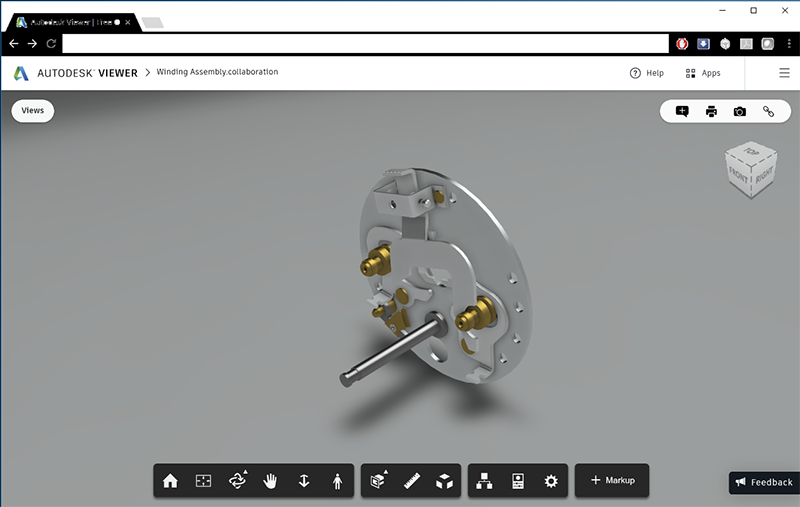
המומחה איגור פופילבסקי בטיפ למשתמשי Vault, בואו להכיר את ה-Shared View ליצירת מבט הנדסי לשיתוף מהיר ויעיל בענן

בטיפ היום נעסוק בניהול מידע - איך לעבוד נכון, איך לנהל קבצים נכון ואיך לסדר את הקבצים
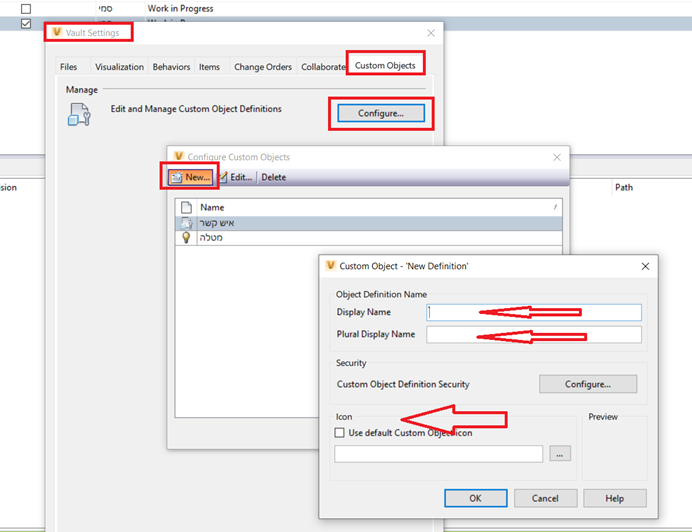
מערכת ה Vault מגיעה עם יכולת מובנית לנהל כרטיסי מוצר. היכנסו לקרוא מדוע יכולת זו חשובה כל כך
בטיפ של היום נראה את אחד החידושים היעילים של מערכת ניהול המידע
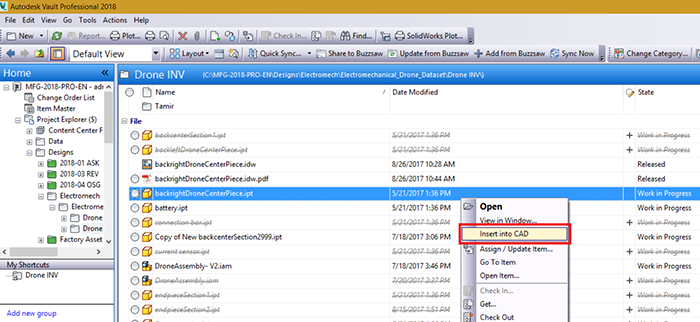
היום נראה חידוש נוסף בגרסה 2018 והוא פקודה חדשה Insert into CAD. היכנסו לקרוא
היכנסו לטיפ המומחה של דני מרגוליס וקראו כיצד ניתן לשתף גורם חיצוני במודל שלנו
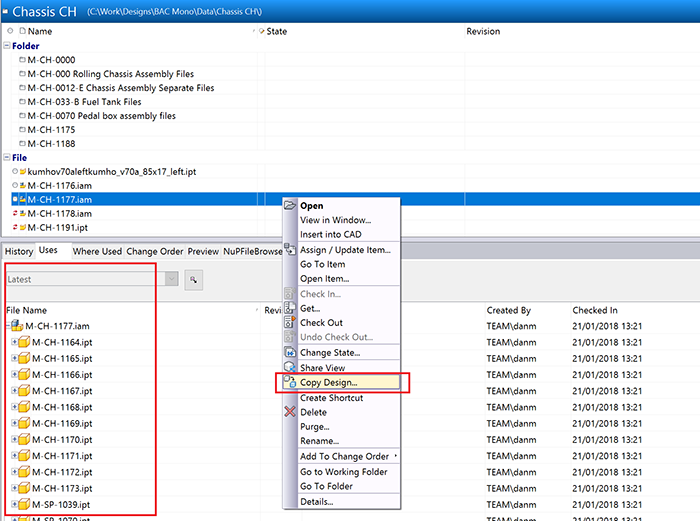
היכנסו לטיפ המומחה של דני מרגוליס וקראו על פקודת 'copy design', העתקות תכנון
בטיפ היום נראה איך מדפיסים את כל השרטוטים שקשורים להרכבה הראשית בתוך מערכת PDM
אחת היכולות של פתרון ה-vault הינה ניהול תצורה של קובץ. היכנסו לקרוא
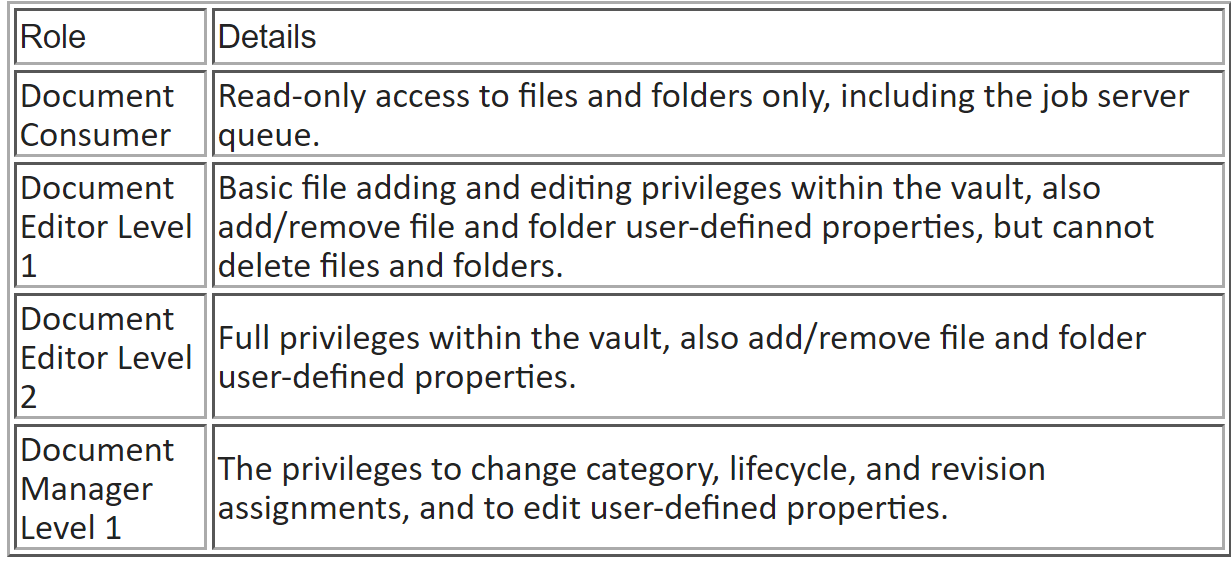
היכנסו לטיפ המומחה של דני מרגוליס ותגלו איך מחליטים למי מותר לערוך או למחוק קבצים בתיקיית פרויקט
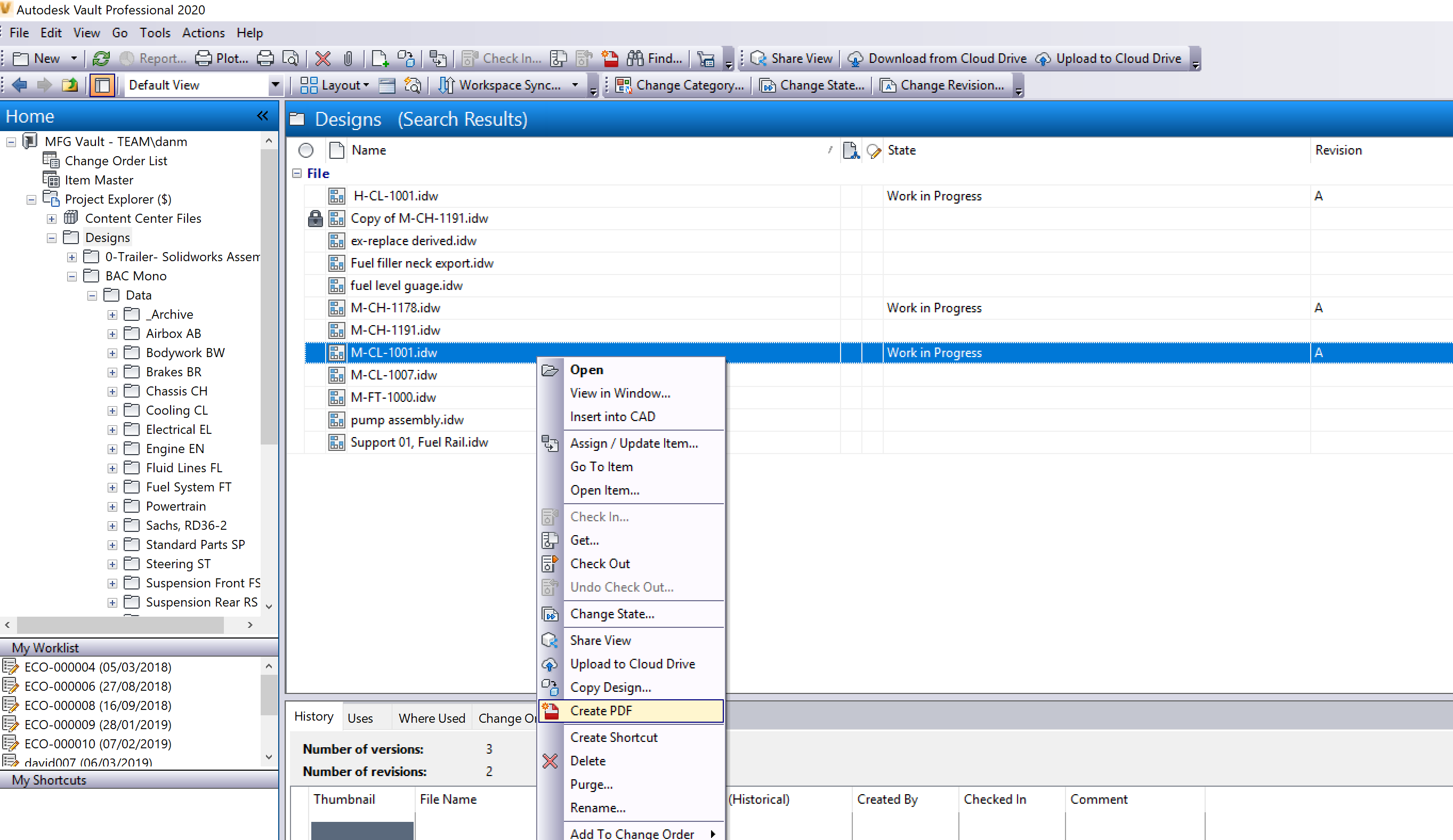
היכנסו לטיפ המומחה של דני מרגוליס ולמדו כיצד להפיק PDF לשרטוטים
בטיפ היום נראה כיצד אנחנו מייצרים קבצי STP בתוך ה-Vault מתוך מודל 3D
מערכת Autodesk Vault מאפשרת גישה למשתמש דרך חשבון המוגדר בדומיין של החברה- Active directory. כיצד עושים זאת?
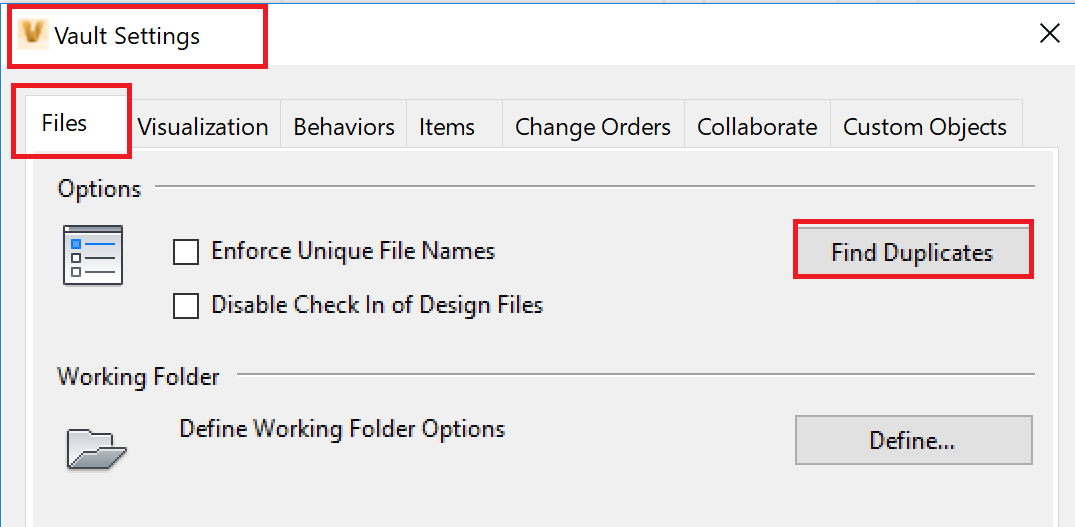
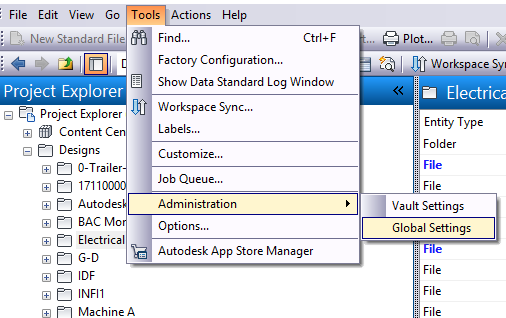
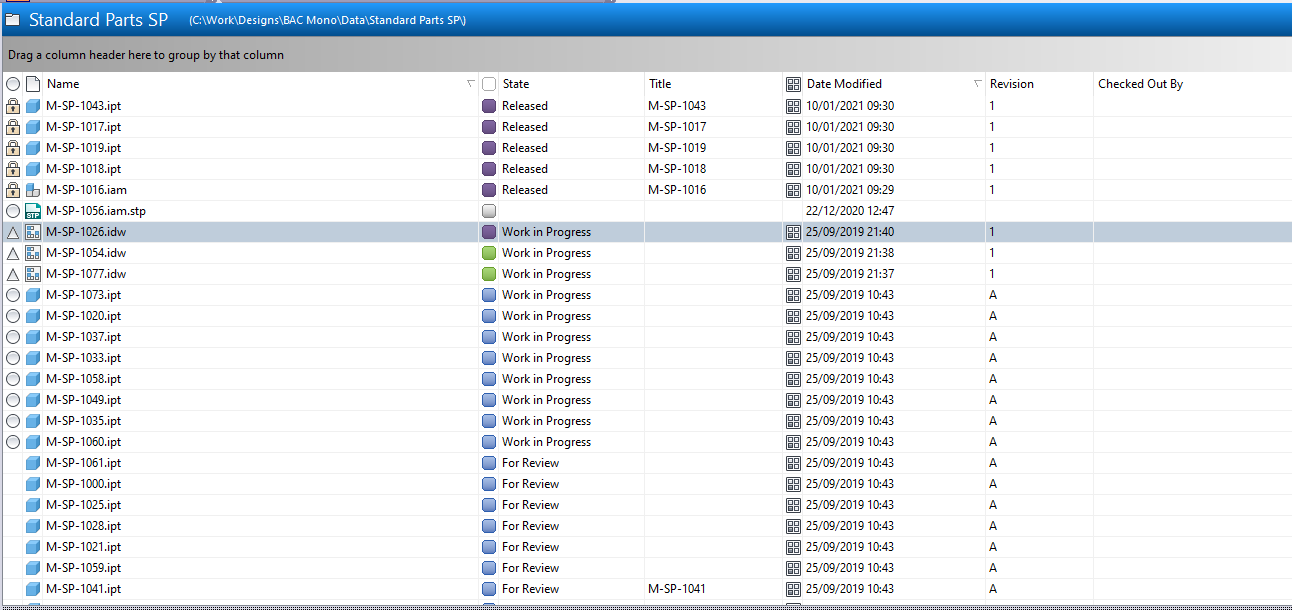
בטיפ היום נסביר איך להתמודד עם אחת הבעיות הקריטיות בכל חברה, בעיית השמות הכפולים
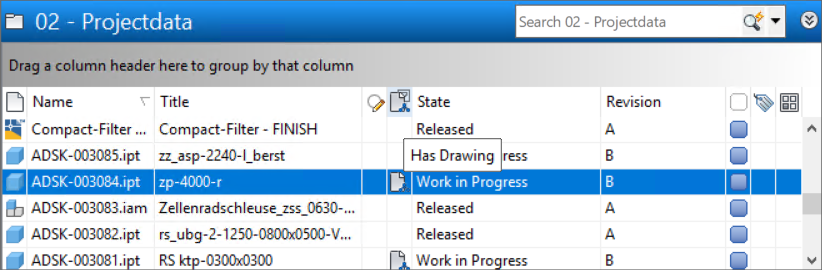
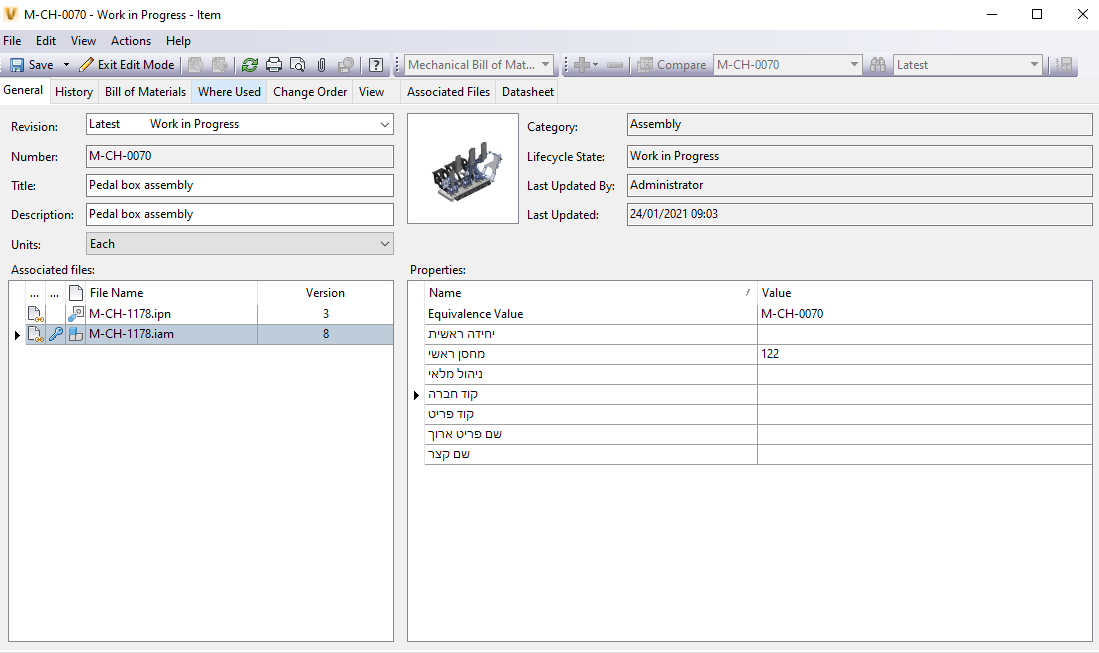
היכנסו לקרוא על המאפיין חדש "Has Drawing" שהתווסף אלינו, בטיפ המומחה של דני מרגוליס
אחד הדברים החשובים בניהול מידע הנדסי הוא לארגן ולסדר את המידע לפי מה שרלוונטי עבורי. כיצד עושים זאת?
Vault knows all! בגרסה 2021 יכולת זו הורחבה עוד קצת
מה מצב הקובץ כרגע? האם אני עובד על הגרסה האחרונה? היכנסו לטיפ המומחה של דני מרגוליס
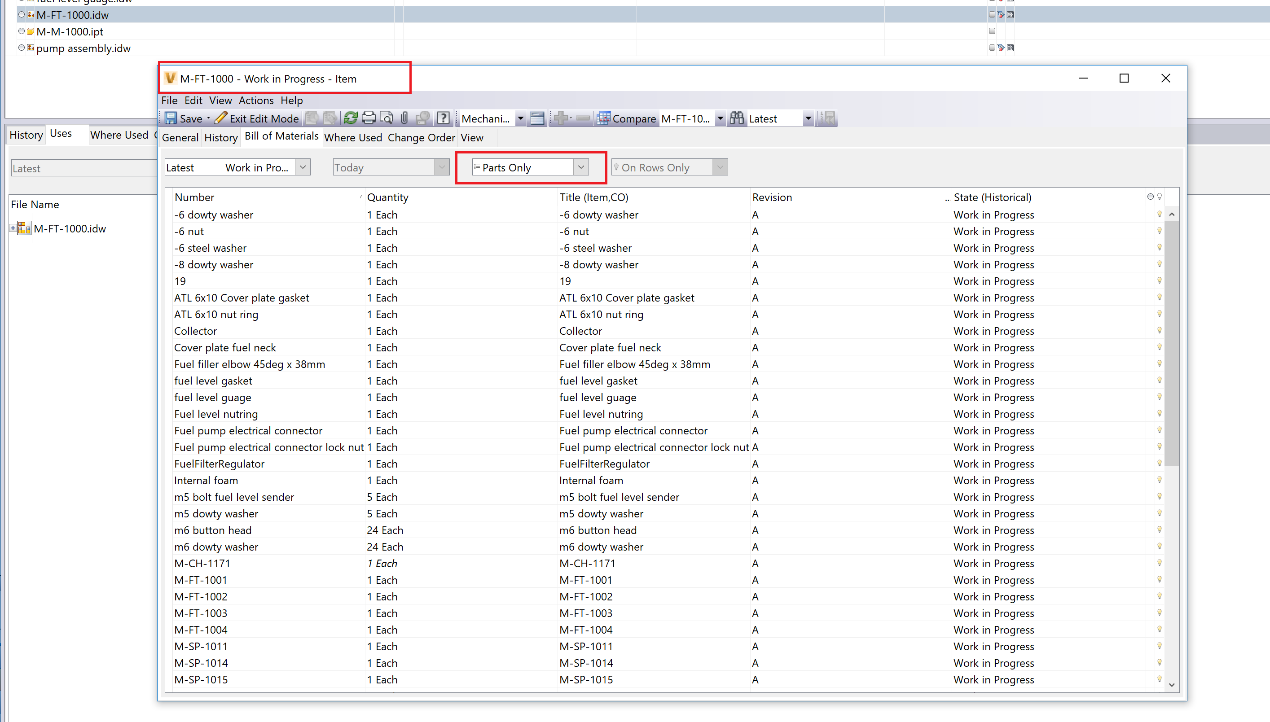
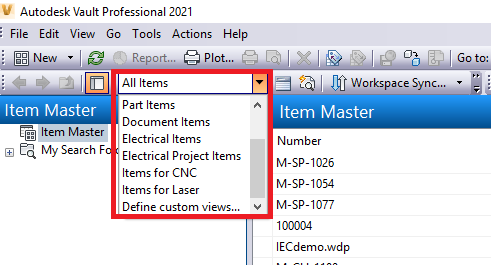
אחת השאלות הנפוצות על המערכת היא - מהו Item Master? האם ארגון צריך להשתמש בפונקציונליות זו?
שורת חיפוש מהיר זאת פונקציונליות קטנה ומגניבה שהתווספה לפני כמה גרסאות. היכנסו וקראו על השימושיות שבה
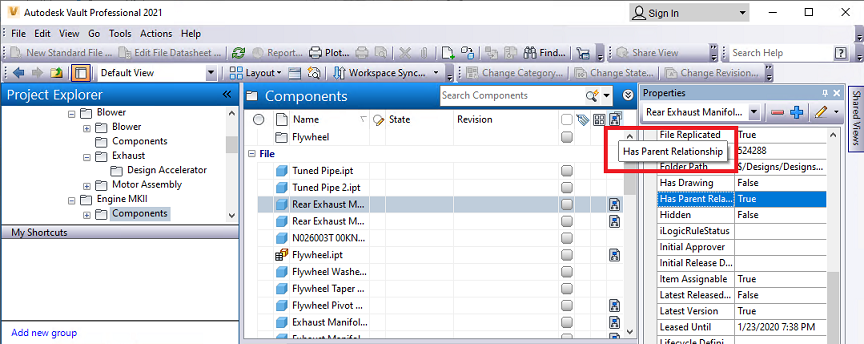
אובייקט שנמצא בתוך המערכת יכול להופיע כקיצור דרך בתיקיות שונות. כיצד אנחנו יכולים ליצור לינק לאובייקט?
היכנסו לטיפ המומחה ולמדו כיצד ניתן לראות קבצים בצורה מרוכזת או מחולקים לקבוצות
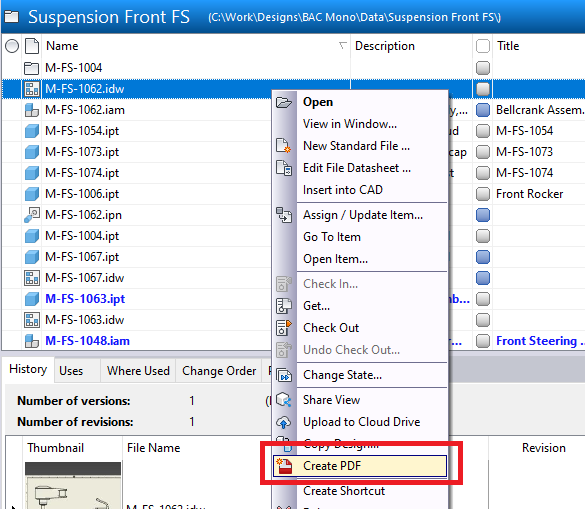
היכנסו לטיפ המומחה ולמדו כיצד ניתן ליצור PDF בצורה מהירה ותחת תהליך נכון
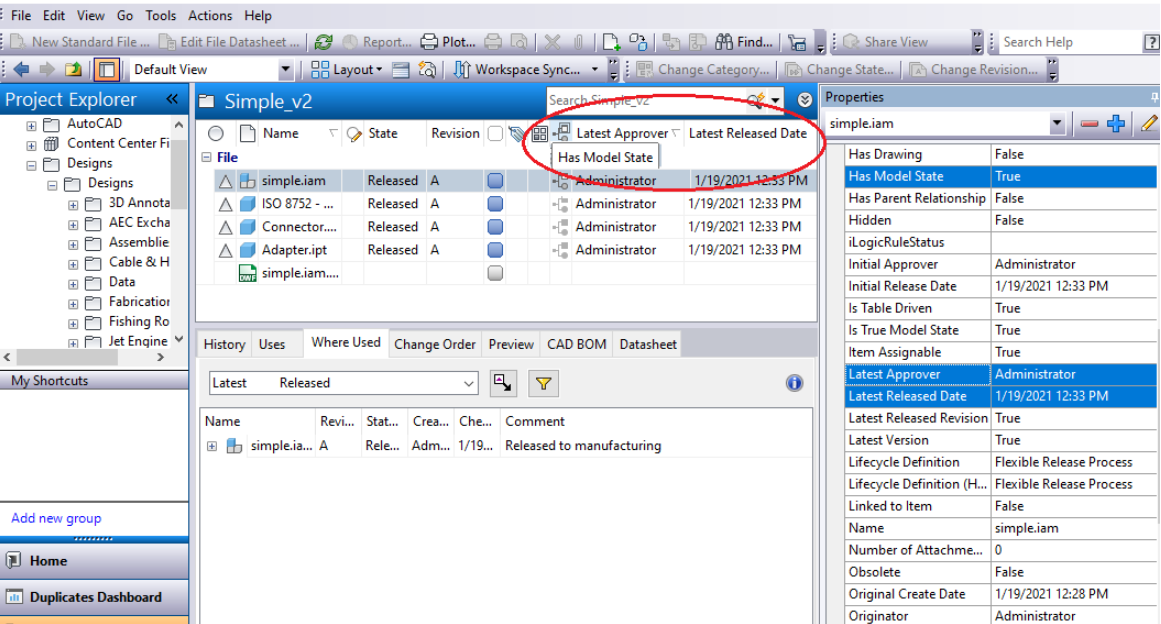
בגרסה החדשה של Vault התווסף מאפיין בשם Latest Approver. איך משתמשים בפיצ'ר? היכנסו לקרוא
איך תוכלו לפתור בקלות את סוגיית הבעלות על הקובץ ולהימנע מטעויות? היכנסו לקרוא בטיפ המומחה של דני מרגוליס
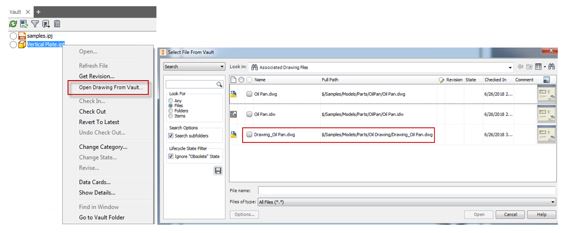
היכנסו לטיפ המומחה של דני מרגוליס ולמדו על האפשרות של לשונית View בתוך המערכת
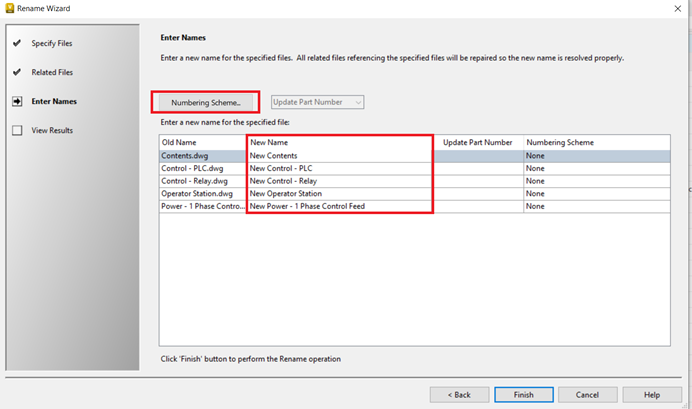
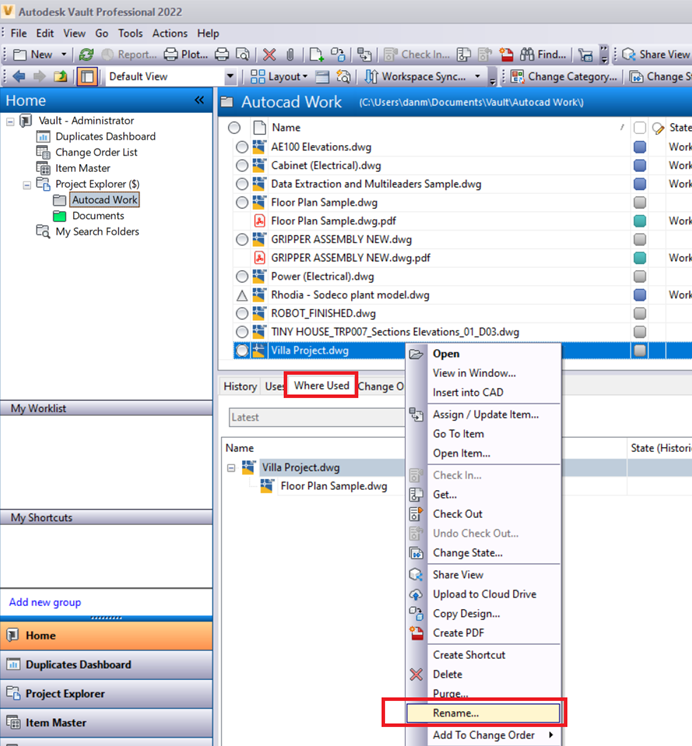
היכנסו ללמוד בטיפ המומחה של דני מרגוליס איך תוכלו לשנות שם לקבצים באופן פשוט, קל ויעיל באמצעות פקודת Rename ב-Vault
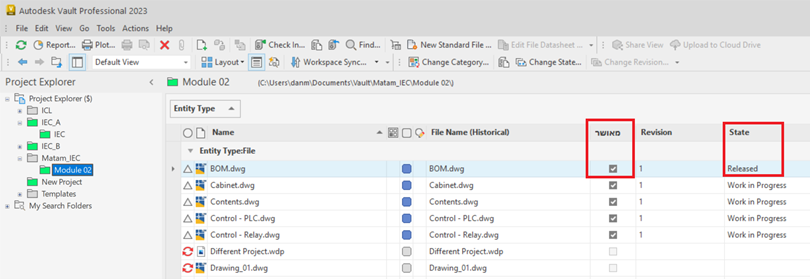
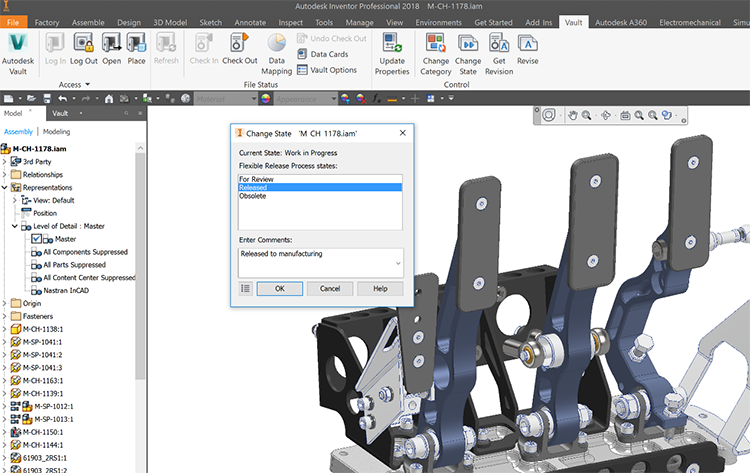
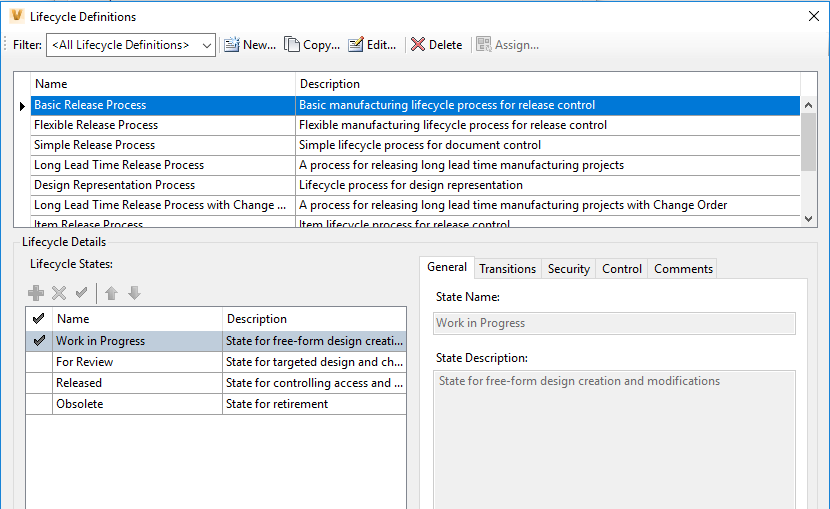
היכנסו לטיפ ותלמדו כיצד תוכלו לשנות את מצב השרטוט באמצעות פקודה פשוטה ב-Vault
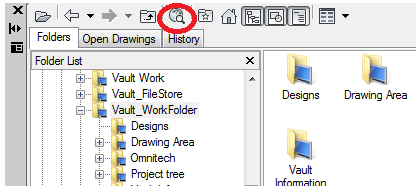
היכנסו ללמוד כיצד לנצל באופן מיטבי את מערכת המידע ההנדסי ונתוני הקבצים שלכם באמצעות Vault
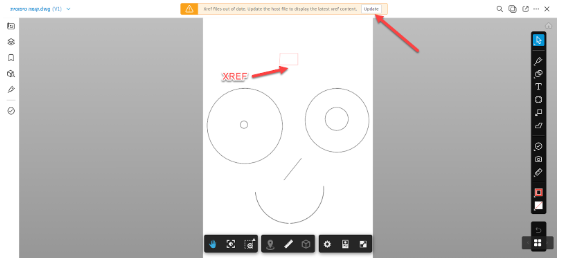
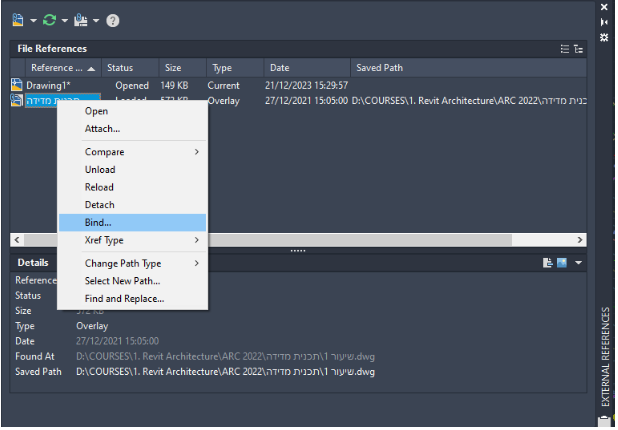
איך מוצאים את ה-XREF בקלות בשרטוטים? היכנסו ללמוד בטיפ המומחה של דני מרגוליס
תים קאד שמה לה למטרה להפוך לשותפה אסטרטגית של לקוחותיה. כנסו לקרוא כיצד סייענו ללקוחותנו במעבר לדיגיטל, כיצד הלקוחות התייעלו, השתפרו והשיגו את המטרות העסקיות שלהם.

פורום BIM ישראל מהווה פלטפורמה ייחודית לשיח, שיתוף פעולה, ידע, ניסיון ומידע עסקי ומקצועי בין כל הגורמים העוסקים בתחום התכנון והבניה בישראל. בפורום מחכים לכם טיפים מקצועיים, הדרכות, מידע על מפגשים ועוד

חדש אצלנו ב- TeamCAD! וובינרים בהובלת מיטב המומחים שלנו, בכל הנושאים הכי חמים והעדכונים החדשים של תוכנות Autodesk
המומחים של TeamCAD פיתחו עבורכם מגוון אפליקציות ייעודיות לשדרוג ותמיכה בעבודה השוטפת בתוכנות Autodesk. ריכזנו עבורכם סרטוני הדרכה והדגמה עבור השימושים השונים באפליקציות
במהלך השנים פיתחנו קורסים מקצועיים עם מיטב המומחים ללימוד תוכנות Autodesk המובילות. ההצלחה המקצועית שלך היא מרכז ההדרכה הארצי aCADemia מהווה את המרכז המקיף והעדכני ביותר להדרכות, עדכונים, והכשרות לתחומי ה- CAD וה- BIM בישראל.

הקורס המקיף ביותר ללימודי תוכנת Revit,
התוכנה המתאימה ביותר לתכנון פרויקטים מורכבים.

כל ארגון שרוצה להצליח ולהתקדם אל העתיד צריך להתמקצע בטכנולוגית BIM.